| Basic, assembled, or complex: | Basic |
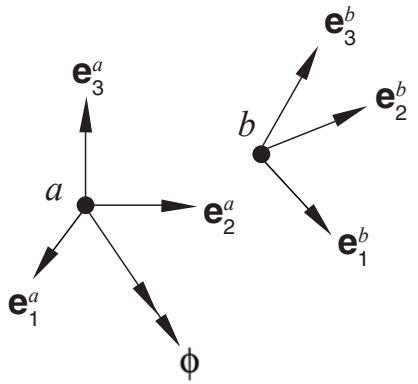
| Kinematic constraints: | $\mathbf{e}_{1}^{a} \cdot \mathbf{e}_{2}^{b} = 0, \mathbf{e}_{1}^{a} \cdot \mathbf{e}_{3}^{b} = 0$ |
| Constraint moment output: | $m_{2}, m_{3}$ |
| Available components: | $ur_{1}$ |
| Kinetic moment output: | $m_{1}$ |
| Orientation at a: | Required |
| Orientation at b: | Optional |
| Connector stops: | $\theta_{1}^{min} \leq \alpha \leq \theta_{1}^{max}$ |
| Constitutive reference angles: | $\theta_{1}^{ref}$ |
| Predefined friction parameters: | None |
| Contact moment for predefined friction: | None |
# ROTATION
Connection type ROTATION provides a rotational connection between two nodes where the relative rotation between the nodes is parameterized by the rotation vector. In two-dimensional and axisymmetric analyses, the ROTATION connection type involves a single (scalar) relative rotation component.
Although available components of relative motion exist for the ROTATION connection type in three-dimensional analysis, the finite rotation parameterization of the connection is not necessarily well-suited for defining connector behavior. If a finite, three-dimensional ROTATION connection with connector behavior is desired, either the CARDAN or EULER connection type typically is more appropriate.
When connection type ROTATION is used in a connector element connected to ground at the element’s first node, the rotational components relative to the orientation at ground are identical to the Abaqus convention for nodal rotation degrees of freedom. Hence, connection type ROTATION can be used in conjunction with prescribed connector motion (see “Connector actuation,” Section 31.1.3) to specify finite rotation boundary conditions in local coordinate directions using the Abaqus convention for finite rotation boundary conditions.