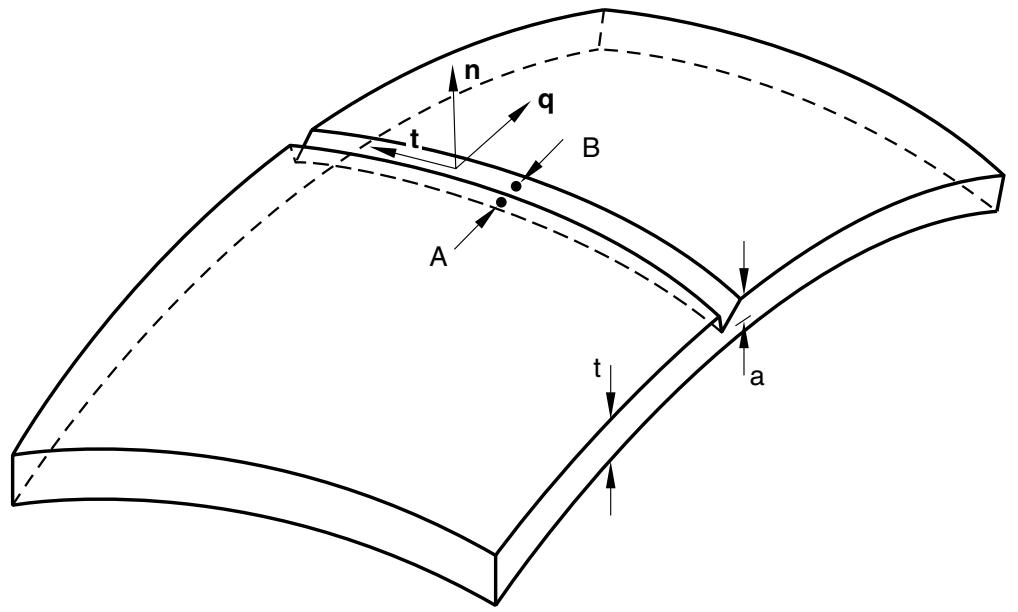
| E33 | Mode II through thickness shear, $(\mathbf{u}_B - \mathbf{u}_A) \cdot \mathbf{n}$ |
| E12 | Mode II rotation, $(\phi_B - \phi_A) \cdot \mathbf{n}$ (this strain plays no role) |
| E13 | Mode III antiplane shear, $(\mathbf{u}_B - \mathbf{u}_A) \cdot \mathbf{t} \times \text{sign}(\text{crack})$ |
| E23 | Mode III opening rotation, $(\phi_B - \phi_A) \cdot \mathbf{q}$ |
The conjugate forces and moments are available by requesting “stress” output.
The J-integral is provided at each integration point. If elastic-plastic material behavior is defined, the elastic and plastic parts of J are provided. The stress intensity factors, K, are also provided corresponding to the elastic parts of J.