(IELEM, INODE) with the increment size factor, FACTO, being input for each increment. This permits unequal load increments to be taken. It should be noted that the applied loading at any instant is accumulative. Therefore, if FACTO is input for the first three increments as respectively 0·5, 0·3 and 0·1, the total loading applied to the structure during the third increment is 0·9 times the loading input in subroutine DATA. The above also holds for loading by incremental prescribed displacements.
TOLER This item of data controls the tolerance permitted on the convergence process. Its use will be described in detail in Sections 3.9.2 and 3.9.3.
Subroutine INCLOD is now presented and described:
SUBROUTINE INCLOD INCL 1
C************************** INCL 2
C INCL 3
C *** INPUTS DATA FOR CURRENT INCREMENT AND UPDATES LOAD VECTOR INCL 4
C INCL 5
C************************** INCL 6
COMMON/UNIM1/NPOIN,NELEM,NBOUN,NLOAD,NPROP,NNODE,IINCS,IITER, INCL 7
KRESL,NCHEK,TOLER,NALGO,NSVAB,NDOFN,NINCS,NEVAB, INCL 8
NITER,NOUTP,FACTO,PVALU INCL 9
COMMON/UNIM2/PROPS(5,4),COORD(26),LNODS(25,2),IFPRE(52), INCL 10
FIXED(52),TLOAD(25,4),RLOAD(25,4),ELOAD(25,4), INCL 11
MATNO(25),STRES(25,2),PLAST(25),XDISP(52), INCL 12
TDISP(26,2),TREAC(26,2),ASTIF(52,52),ASLOD(52), INCL 13
REACT(52),FRESV(1352),PEFIX(52),ESTIF(4,4) INCL 14
READ (5,900) NITER,NOUTP,FACTO,TOLER INCL 15
900 FORMAT(2I5,2F15.5) INCL 16
WRITE(6,905) IINCS,NITER,NOUTP,FACTO,TOLER INCL 17
905 FORMAT(1H0,5X,'IINCS=',I5,3X,'NITER=',I5,3X,'NOUTP=',I5, INCL 18
3X,'FACTO=',E14.6,3X,'TOLER=',E14.6) INCL 19
DO 10 IELEM=1,NELEM INCL 20
DO 10 IEVAB=1,NEVAB INCL 21
ELOAD(IELEM,IEVAB)=ELOAD(IELEM,IEVAB)+RLOAD(IELEM,IEVAB)*FACTO INCL 22
TLOAD(IELEM,IEVAB)=TLOAD(IELEM,IEVAB)+RLOAD(IELEM,IEVAB)*FACTO INCL 23
10 CONTINUE INCL 24
RETURN INCL 25
END INCL 26
INCL 15–19 Read and write the input data required for each load increment as described previously in this section.
INCL 20-24 Add the current increment of load into the out of balance load array ELOAD and the total applied load vector TLOAD.
# 3.8 The master or controlling segment
The final portion of the program which will be common to all four programs (subject to the minor differences indicated in Fig. 3.1) is the master segment which controls the calling, in order, of the other subroutines. This program segment also controls the iterative process and also the incrementing of the applied loads, where appropriate.
The following channel numbers are employed by the programs: 5 (card reader), 6 (line printer), 1 (scratch file).
The MASTER segment will now be presented in the form required in the next section for the solution of one-dimensional quasi-harmonic problems by direct iteration. For other applications it is only necessary to arrange for the calling of appropriate subroutines as indicated in Fig. 3.1.
```csv
MASTER UNIDIM
C*****
C
C *** PROGRAM FOR THE 1-D SOLUTION OF NONLINEAR PROBLEMS
C
C*****
COMMON/UNIM1/NPOIN, NELEM, NBOUN, NLOAD, NPROP, NNODE, IINCS, IITER,
KRESL, NCHEK, TOLER, NALGO, NSVAB, NDOFN, NINCS, NEVAB,
NITER, NOUTP, FACTO, PVALU
COMMON/UNIM2/PROPS(5,4), COORD(26), LNODS(25,2), IFPRE(52),
FIXED(52), TLOAD(25,4), RLOAD(25,4), ELOAD(25,4),
MATNO(25), STRES(25,2), PLAST(25), XDISP(52),
TDISP(26,2), TREAC(26,2), ASTIF(52,52), ASLOD(52),
REACT(52), FRESV(1352), PEFIX(52), ESTIF(4,4)
CALL DATA
CALL INITIAL
DO 30 IINCS=1, NINCS
CALL INCLOD
DO 10 IITER=1, NITER
CALL NONAL
IF(KRESL.EQ.1) CALL STIFF1
CALL ASSEMB
IF(KRESL.EQ.1) CALL GREDUC
IF(KRESL.EQ.2) CALL RESOLV
CALL BAKSUB
CALL MONITR(RINTL)
IF(NCHEK.EQ.0) GO TO 20
IF(IITER.EQ.1. AND.NOUTP.EQ.1) CALL RESULT
IF(NOUTP.EQ.2) CALL RESULT
10 CONTINUE
WRITE(6,900)
900 FORMAT(1H0,5X,'SOLUTION NOT CONVERGED')
STOP
20 CALL RESULT
30 CONTINUE
STOP
END
QUIT 1
QUIT 2
QUIT 3
QUIT 4
QUIT 5
QUIT 6
QUIT 7
QUIT 8
QUIT 9
QUIT 10
QUIT 11
QUIT 12
QUIT 13
QUIT 14
QUIT 15
QUIT 16
QUIT 17
QUIT 18
QUIT 19
QUIT 20
QUIT 21
QUIT 22
QUIT 23
QUIT 24
QUIT 25
QUIT 26
QUIT 27
QUIT 28
QUIT 29
QUIT 30
QUIT 31
QUIT 32
QUIT 33
QUIT 34
QUIT 35
QUIT 36
QUIT 37
```
QUIT 15 Call the subroutine which reads the input data as described in Section 3.2.
QUIT 16 Call the subroutine which initialises various arrays to zero.
QUIT 17 Enter the DO LOOP over the number of load increments.
QUIT 18 Call the subroutine which increments the applied loads.
QUIT 19 Enter the DO LOOP over the maximum permissible number of iterations.
QUIT 20 Call the subroutine which controls the solution process as described in Section 3.3.
QUIT 21 If the element stiffnesses are to be reformulated, call the appropriate subroutine.
QUIT 22–25 Call the subroutines which assemble the element stiffnesses and solve for the unknowns and reactions.
QUIT 26 Call the subroutine which monitors the convergence process. This subroutine differs for the direct iteration method from that for the three other cases.
QUIT 27 If the solution has converged, abandon the iterative process.
QUIT 28–29 Output the results according to the display code, NOUTP, supplied as input for this particular load increment.
QUIT 31–33 If the solution procedure reaches the maximum number of iterations permitted without convergence occurring, write a message and stop the program.
QUIT 34 Otherwise output the converged results.
QUIT 35 Return to process the next increment of load.
# 3.9 Program for the solution of one-dimensional quasi-harmonic problems by direct iteration
We now assemble a computer program which permits the solution of one-dimensional problems governed by a nonlinear quasi-harmonic equation. The behaviour of several physical situations can be described by such a model and some numerical examples will be provided at the end of this section.
Most of the subroutines required for this program have been already described in the preceding sections of this chapter and, in particular, the master segment which controls the entire numerical process was described in Section 3.8. The additional subroutines, pertinent only to this application which must be developed, are the element stiffness generation subroutine, STIFF1, and the solution convergence monitoring subroutine, MONITR. Detailed ‘user instructions’, listing the required input data, are included in Appendix I.
# 3.9.1 Element stiffness subroutine, STIFF1
The purpose of this subroutine is to formulate the stiffness matrix for each element in turn and store this data on a disc file. For solution by the method of direct iteration, the stiffness matrix for a one-dimensional element with a linear variation of the unknown is given by equation (2.25). The term K is, however, a specified function of the unknown or its derivatives which must be accounted for when formulating the element stiffnesses for each iteration of the solution sequence. In particular, K is assumed to vary according to
$$
K = K _ {0} f \left(\phi , \frac {d \phi}{d x}\right), \tag {3.20}
$$
where $K_{0}$ is a reference value of K and is specified as material property PROPS (NUMAT, 1) in subroutine DATA. The function $f(\phi, d\phi/dx)$ is
defined by means of a FORTRAN FUNCTION statement and must be appropriately specified for each application.
Subroutine STIFFI is now presented and descriptive notes provided.
```fortran
SUBROUTINE STIFF1 STF1 1
C************************** STF1 2
C STF1 3
C *** CALCULATES ELEMENT STIFFNESS MATRICES STF1 4
C STF1 5
C************************** STF1 6
COMMON/UNIM1/NPOIN, NELEM, NBOUN, NLOAD, NPROP, NNODE, IINCS, IITER, STF1 7
KRESL, NCHEK, TOLER, NALGO, NSVAB, NDOFN, NINCS, NEVAB, STF1 8
NITER, NOUTP, FACTO, PVALU STF1 9
COMMON/UNIM2/PROPS(5,4), COORD(26), LNODS(25,2), IFPRE(52), STF1 10
FIXED(52), TLOAD(25,4), RLOAD(25,4), ELOAD(25,4), STF1 11
MATNO(25), STRES(25,2), PLAST(25), XDISP(52), STF1 12
TDISP(26,2), TREAC(26,2), ASTIF(52,52), ASLOD(52), STF1 13
REACT(52), FRESV(1352), PEFIX(52), ESTIF(4,4) STF1 14
REWIND 1 STF1 15
DO 10 Ielem=1, NELEM STF1 16
LPROP=MATNO(IELEM) STF1 17
STERM=PROPS(LPROP,1) STF1 18
NODE1=LNODS(IELEM,1) STF1 19
NODE2=LNODS(IELEM,2) STF1 20
ELENG=ABS(COORD(NODE1)-COORD(NODE2)) STF1 21
AVERG=(TDISP(NODE1,1)+TDISP(NODE2,1))/2.0 STF1 22
FMULT=STERM*VARIA(AVERG)/ELENG STF1 23
ESTIF(1,1)=FMULT STF1 24
ESTIF(1,2)=-FMULT STF1 25
ESTIF(2,1)=-FMULT STF1 26
ESTIF(2,2)=FMULT STF1 27
WRITE(1) ESTIF STF1 28
10 CONTINUE STF1 29
RETURN STF1 30
END STF1 31
```
STF1 15 Rewind the file on which the stiffness matrix for each element will be stored in sequence.
STF1 16 Loop over each element.
STF1 17 Identify the material property of each element.
STF1 18 Set STERM equal to $K_{0}$ .
STF1 19-20 Identify the node numbers of the element.
STF1 21 Calculate the element length.
STF1 22 Calculate the element temperature as the average of the nodal values.
STF1 23 Calculate the temperature gradient.
STF1 24–27 Compute the components of the element stiffness matrix according to (2.25) with the function $f(\phi, d\phi/dx)$ being VARIA (AVERG).
STF1 28 Write the element stiffness matrix on to disc file.
STF1 29 Termination of DO LOOP over each element.
The function $f(\phi, d\phi/dx)$ must be defined for each application. Below we show, for example, the appropriate function for the variation $K = K_{0}(1 + 10\phi)$ .
FUNCTION VARIA(AVERG) STF1 32
C**** STF1 33
C MULTIPLYING FUNCTION FOR QUASI-HARMONIC STIFFNESS VARIATION STF1 34
C**** STF1 35
VARIA=1.0+10.0*AVERG STF1 36
RETURN STF1 37
END STF1 38
# 3.9.2 Solution convergence monitoring subroutine, MONITR
Convergence of the numerical process to the nonlinear solution must be monitored by comparing, in some way, the values of the unknowns $\varphi$ determined during each iteration. One possible method is to compare each individual nodal value with the corresponding value obtained on the previous iteration. Then, provided that this change is negligibly small for all nodal points, convergence can be deemed to have occurred. In this chapter we will employ a global convergence check rather than such a local one. We will assume that the numerical process has converged if
$$
\frac {\left| \sqrt {\left[ \sum_ {i = 1} ^ {N} \left(\phi_ {i} ^ {r}\right) ^ {2} \right]} - \sqrt {\left[ \sum_ {i = 1} ^ {N} \left(\phi_ {i} ^ {r - 1}\right) ^ {2} \right]} \right|}{\sqrt {\left[ \sum_ {i = 1} ^ {N} \left(\phi_ {i} ^ {1}\right) ^ {2} \right]}} \times 1 0 0 \leqslant \text { TOLER }, \tag {3.21}
$$
where N denotes the total number of nodal points in the problem and r-1 and r denote successive iterations. It is assumed that the positive root is always considered and $\mid\mid$ signifies the absolute value of the numerator. The multiplication factor of 100 on the left-hand side allows the specified tolerance factor TOLER to be considered as a percentage term. Equation (3.21) states that convergence is assumed to have occurred if the difference in the norm of the unknowns between two successive iterations is less than or equal to TOLER times the norm of the unknowns on the first iteration. In practical situations a value of TOLER = 1·0 (i.e., 1%) is found to be adequate for the majority of applications. Convergence of the solution is indicated by the parameter NCHEK. A value of NCHEK = 1 indicates that convergence has not yet occurred, whereas NCHEK = 0, denotes a converged solution. Subroutine MONITR is now presented and descriptive notes provided.
SUBROUTINE MONITR (RINTL) MNTR 1
C*******************************MNTR 2
C MNTR 3
C *** CHECKS FOR SOLUTION CONVERGENCE MNTR 4
C MNTR 5
C*******************************MNTR 6
COMMON/UNIM1/NPOIN, NELEM, NBOUN, NLOAD, NPROP, NNODE, IINCS, IITER, MNTR 7
KRESL, NCHEK, TOLER, NALGO, NSVAB, NDOFN, NINCS, NEVAB, MNTR 8
NITER, NOUTP, FACTO, PVALU MNTR 9
COMMON/UNIM2/PROPS(5,4), COORD(26), LNODS(25,2), IFPRE(52), MNTR 10
FIXED(52), TLOAD(25,4), RLOAD(25,4), ELOAD(25,4), MNTR 11
MATNO(25),STRES(25,2),PLAST(25),XDISP(52), MNTR 12
TDISP(26,2),TREAC(26,2),ASTIF(52,52),ASLOD(52), MNTR 13
REACT(52),FRESV(1352),PEFIX(52),ESTIF(4,4) MNTR 14
NCHEK=0 MNTR 15
RCURR=0.0 MNTR 16
DO 10 IPOIN=1,NPOIN MNTR 17
10 RCURR=RCURR+TDISP(IPOIN,1)*TDISP(IPOIN,1) MNTR 18
IF(IITER.EQ.1) RINTL=RCURR MNTR 19
IF(IITER.EQ.1) NCHEK=1 MNTR 20
IF(IITER.EQ.1) GO TO 20 MNTR 21
RATIO=100.0*SQRT(ABS(RCURR-PVALU))/SQRT(RINTL) MNTR 22
IF(RATIO.GT.TOLER) NCHEK=1 MNTR 23
20 PVALU=RCURR MNTR 24
WRITE(6,900) NCHEK,RATIO MNTR 25
900 FORMAT(1H0,5X,18HCONVERGENCE CODE =,I4,3X,28HNORM OF RESIDUAL SUM MNTR 26
.RATIO =,E14.6) MNTR 27
RETURN MNTR 28
END MNTR 29
MNTR 15 Set the indicator monitoring convergence to zero. If convergence has not yet occurred this will be set to 1 later in the subroutine.
MNTR 16–18 Compute the norm of the unknowns
$$
\sum_ {i = 1} ^ {N} \phi_ {i} ^ {2},
$$
for the current iteration.
MNTR 19 For the first iteration only compute the denominator of (3.21).
MNTR 20-21 Convergence cannot possibly have occurred on the first iteration, therefore set NCHEK = 1 and skip the remainder of the checking procedure by going to 20.
MNTR 22 Compute the left-hand side of (3.21).
MNTR 23 If (3.21) is not satisfied (i.e., convergence not taken place), set NCHEK = 1.
MNTR 24 Store the current value of the norm of the unknowns for use as
$$
\sum_ {i = 1} ^ {N} (\phi_ {i} r ^ {- 1}) ^ {2}
$$
during the next iteration.
MNTR 25-27 Output the value of NCHEK and the left-hand side of (3.21).
# 3.9.3 Numerical examples
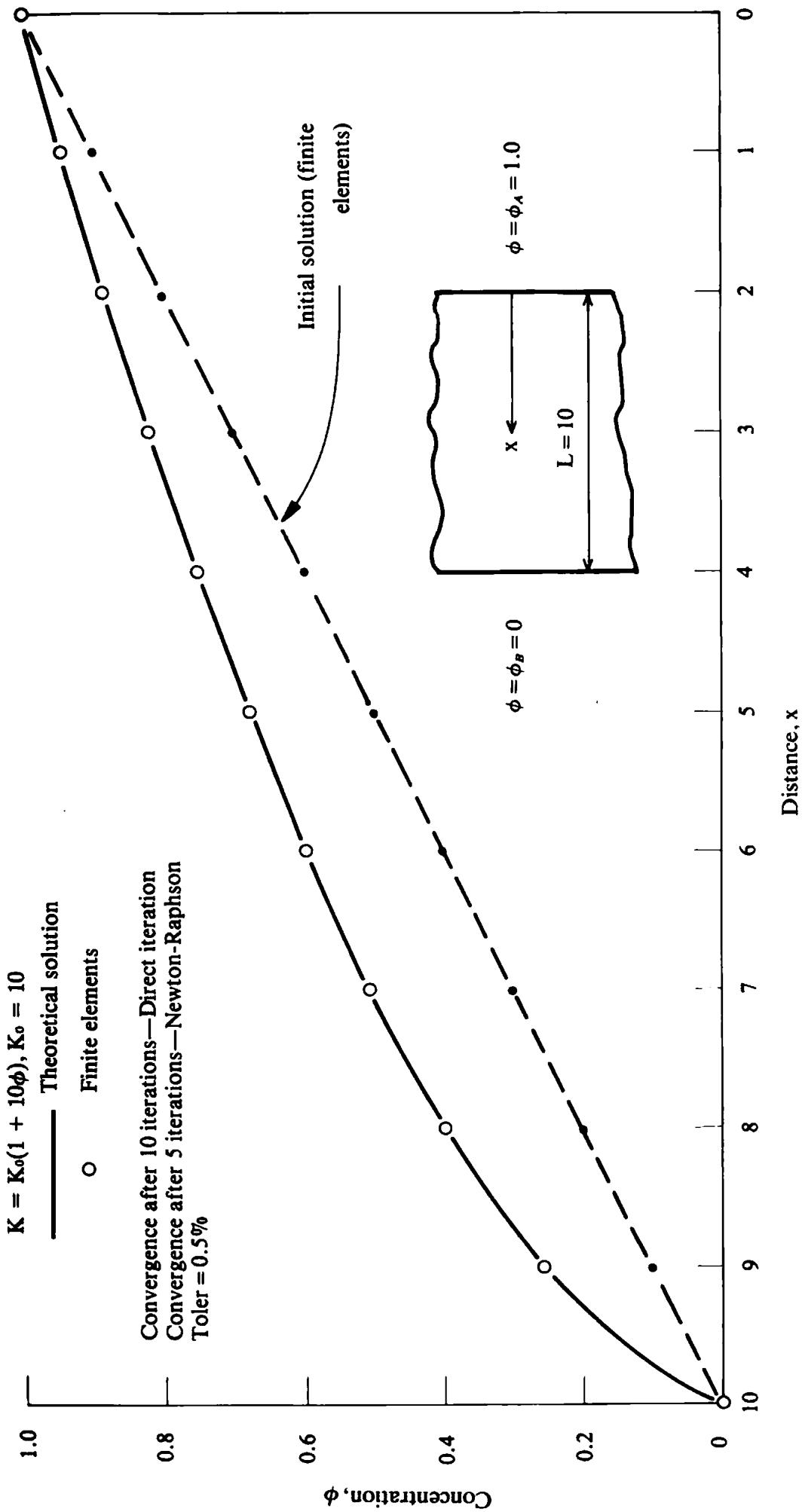
The first numerical example considered is illustrated in Fig. 3.3. The situation shown could physically represent the diffusion of a gas through a membrane in which case $\phi$ is the gas concentration and K is the diffusivity of the membrane. Alternatively, the problem also represents the conduction of heat through a one-dimensional solid in which case $\phi$ is the temperature and K the thermal conductivity. The boundary conditions assumed are
line
| Distance, x | Theoretical solution (φ) | Finite elements (φ) |
| ----------- | ------------------------ | ------------------- |
| 10 | 0.0 | 0.0 |
| 9 | 0.25 | 0.25 |
| 8 | 0.4 | 0.4 |
| 7 | 0.5 | 0.5 |
| 6 | 0.6 | 0.6 |
| 5 | 0.7 | 0.7 |
| 4 | 0.8 | 0.8 |
| 3 | 0.9 | 0.9 |
| 2 | 0.95 | 0.95 |
| 1 | 0.98 | 0.98 |
| 0 | 1.0 | 1.0 |
Fig. 3.3 Quasi-harmonic equation example—Problem of gas diffusion through a permeable membrane.
specified values of the unknown at the two boundaries. The term K is assumed to vary with the unknown $\phi$ according to
$$
K = K _ {0} (1 + 1 0 \phi) = K _ {0} (1 + g (\phi)). \tag {3.22}
$$
An analytical solution $^{(6)}$ exists for this problem which enables $\phi$ to be determined from
$$
\frac {\phi_ {A} + F \left(\phi_ {A}\right) - \phi - F (\phi)}{\phi_ {A} + F \left(\phi_ {A}\right) - \phi_ {B} - F \left(\phi_ {B}\right)} = \frac {x}{L}, \tag {3.23}
$$
where
$$
F (\phi) = \int_ {0} ^ {\phi} g \left(\phi^ {\prime}\right) d \phi^ {\prime}. \tag {3.24}
$$
In the present case, $g(\phi) = 10\phi$ which gives on substitution in (3.24) and then in (3.23)
$$
\frac {6 - \phi - 5 \phi^ {2}}{6} = \frac {x}{1 0}, \tag {3.25}
$$
which allows $\phi$ to be determined for any value of $x$ and is shown as the full line in Fig. 3.3. The initial finite element solution (i.e., after the first iteration) is shown in Fig. 3.3 as the broken line and, as expected, is linear. The results upon convergence, after 10 iterations, of the process are then included as circles and it is seen that the numerical solution coincides with the theoretical values. For example, for $x = 6$ , the theoretical solution is $\phi = 0\cdot 6$ , whilst the finite element analysis yields $\phi = 0\cdot 599999$ (see Appendix IV).
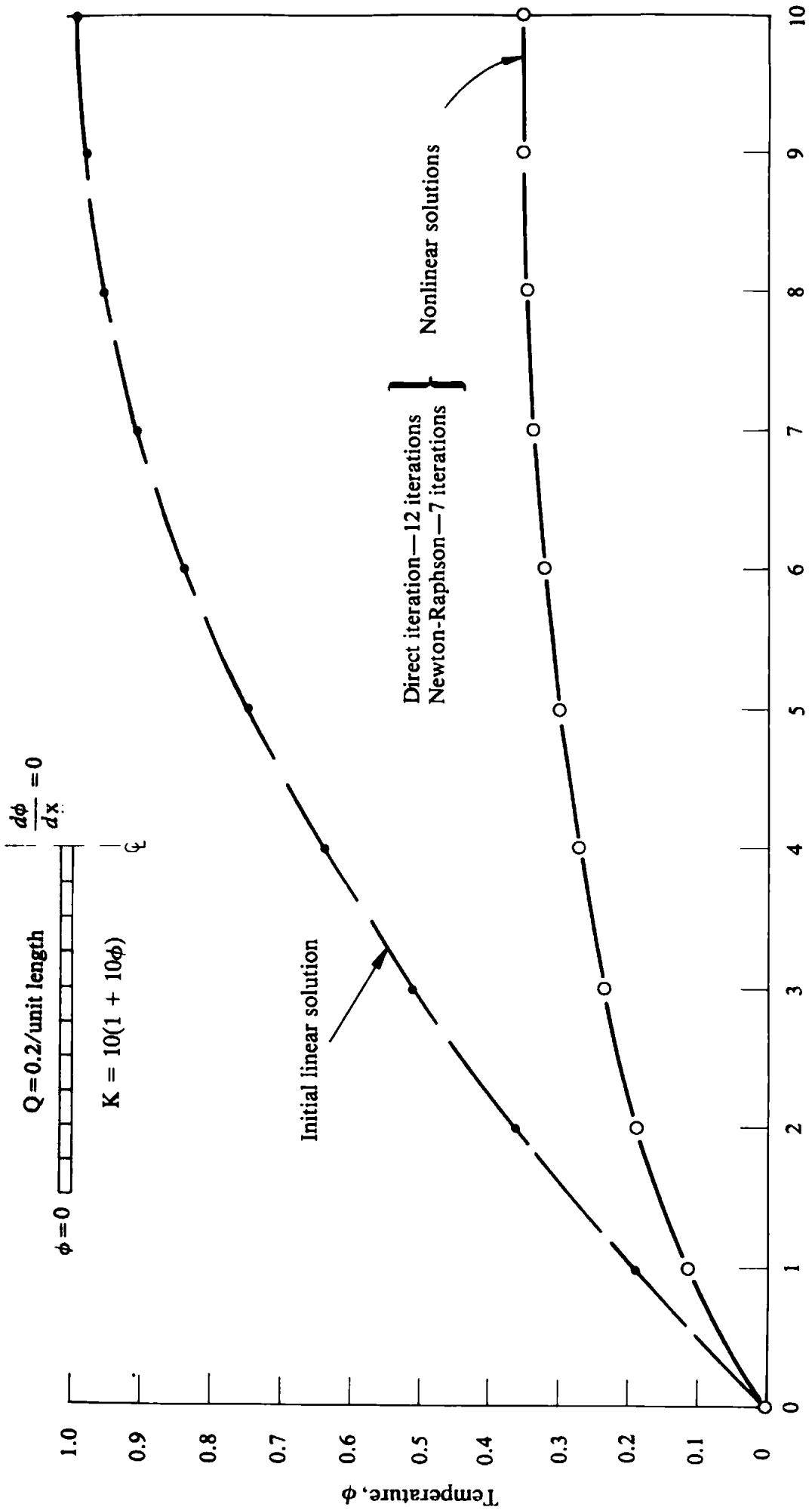
The second example considered includes the effect of the term Q in (2.15). For thermal problems this can be physically interpreted as a heat generation/unit length and must be specified as a loading, according to (2.26), in subroutine DATA. Figure 3.4 shows the problem to be considered. A bar with its surface insulated generates heat internally and the temperature at its ends is maintained at zero value. Due to symmetry only one half of the problem is analysed with the symmetry condition $d\phi/dx = 0$ at the centreline being invoked. The initial solution corresponding to $K = K_{0}$ is shown and is practically identical to the theoretical value. The process converged to the nonlinear solution after 12 iterations with the temperature being markedly reduced. The reduction is greater in regions of higher initial temperature due to the comparatively greater increase in material ‘stiffness’ in these areas.
# 3.10 Program for the solution of one-dimensional quasi-harmonic problems by the Newton-Raphson method
As seen in Section 2.3, use of this method results in the assembled stiffness equations being nonsymmetric. The equation assembly and solution routines developed in Section 3.4 made no use of the symmetry properties of the
line
| Iteration | Initial linear solution | Direct iteration—12 iterations Newton-Raphson—7 iterations | Nonlinear solutions |
| --------- | ------------------------ | ------------------------------------------------------------- | ------------------- |
| 0 | 0.0 | 0.0 | 0.0 |
| 1 | 0.19 | 0.11 | 0.11 |
| 2 | 0.36 | 0.19 | 0.19 |
| 3 | 0.51 | 0.23 | 0.23 |
| 4 | 0.63 | 0.27 | 0.27 |
| 5 | 0.74 | 0.30 | 0.30 |
| 6 | 0.83 | 0.32 | 0.32 |
| 7 | 0.90 | 0.34 | 0.34 |
| 8 | 0.95 | 0.35 | 0.35 |
| 9 | 0.98 | 0.35 | 0.35 |
| 10 | 1.0 | 0.35 | 0.35 |
Fig. 3.4 Quasi-harmonic equation example—Heat generation in an axial bar.
stiffness matrices. They are therefore applicable to this method of analysis without modification.
Three additional subroutines need to be developed. These are the element stiffness subroutine ASTIF1 and, since solution convergence is now based on the elimination of the residual forces, subroutine REFOR1 must be formed to calculate these forces and subroutine CONVER to monitor their convergence to zero. The master segment controlling the solution process is again that developed in Section 3.8 and the remaining subroutines accessed by this segment have also been described previously.
# 3.10.1 Element stiffness formulation subroutine, ASTIF1
For solution by the Newton–Raphson process, the ‘stiffness’ equations which require solution are summarised in (2.12) where it is seen that the total stiffness is the sum of symmetric, H, and nonsymmetric, $H'$ , contributions. The symmetric stiffness matrix is given by (2.25) and the nonsymmetric terms depend on the particular form of material nonlinearity. For a material nonlinearity of the form (2.27), the nonsymmetric portion of the stiffness matrix is given by (2.29). The subroutine which evaluates and sums these separate contributions is now presented below.
```txt
SUBROUTINE ASTIF1 ASTF 1
C************************** ASTF 2
C ASTF 3
C *** CALCULATES ELEMENT STIFFNESS MATRICES ASTF 4
C ASTF 5
C************************** ASTF 6
COMMON/UNIM1/NPOIN.NELEM,NBOUN,NLOAD,NPROP,NNODE,IINCS,IITER, ASTF 7
. KRESL,NCHEK,TOLER,NALGO.NSVAB,NDOFN,NINCS,NEVAB, ASTF 8
. NITER.NOUTP,FACTO,PVALU ASTF 9
COMMON/UNIM2/PROPS(5.4),COORD(26),LNODS(25,2),IFPRE(52), ASTF 10
. FIXED(52),TLOAD(25,4),RLOAD(25,4),ELOAD(25,4), ASTF 11
. MATNO(25),STRES(25,2),PLAST(25),XDISP(52), ASTF 12
. TDISP(26.2),TREAC(26.2),ASTIF(52,52),ASLOD(52), ASTF 13
. REACT(52),FRESV(1352),PEFIX(52),ESTIF(4.4) ASTF 14
REWIND 1 ASTF 15
DO 10 IELEM=1.NELEM ASTF 16
LPROP=MATNO(IELEM) ASTF 17
STERM=PROPS(LPROP,1) ASTF 18
GRADU=PROPS(LPROP,2) ASTF 19
NODE1=LNODS(IELEM,1) ASTF 20
NODE2=LNODS(IELEM,2) ASTF 21
ELENG=ABS(COORD(NODE1)-COORD(NODE2)) ASTF 22
AVERG=(TDISP(NODE1.1)+TDISP(NODE2,1))/2.0 ASTF 23
FMULT=STERM*VARIA(AVERG)/ELENG ASTF 24
DIFFR=TDISP(NODE1.1)-TDISP(NODE2,1) ASTF 25
COEFF=STERM*GRADU*DIFFR/(2.0*ELENG) ASTF 26
ESTIF(1,1)=FMULT+COEFF ASTF 27
ESTIF(1,2)=-FMULT+COEFF ASTF 28
ESTIF(2,1)=-FMULT-COEFF ASTF 29
ESTIF(2,2)=FMULT-COEFF ASTF 30
WRITE(1) ESTIF ASTF 31
10 CONTINUE ASTF 32
RETURN ASTF 33
END ASTF 34
```