# 3-6 유한요소 정식화
국부좌표계에서 계면력은 국부좌표계에서의 계면요소 상대변위 ∆ux , ∆uy , ∆uz 와강성행렬 D 로부터 유도될수 있다.
$$
\left\{ \begin{array}{l} \mathbf {t} _ {x} \\ \mathbf {t} _ {y} \\ \mathbf {t} _ {z} \end{array} \right\} = \mathbf {D} \left\{ \begin{array}{l} \Delta \mathbf {u} _ {x} \\ \Delta \mathbf {u} _ {y} \\ \Delta \mathbf {u} _ {z} \end{array} \right\} \tag {3.6.1}
$$
계면요소의 변형율 에너지(strain energy) 식을 변분하여 얻어지는 강성행렬 식은 다음과 같다.
$$
\mathbf {K} _ {\text { inter }} = \int_ {\Gamma} \mathbf {B} _ {\text { inter }} ^ {T} \mathbf {D} \mathbf {B} _ {\text { inter }} d \Gamma \tag {3.6.2}
$$
그리고 내력(internal force)식은 다음과 같다.
$$
\mathbf {F} _ {\text { inter }} = \int_ {\Gamma} \mathbf {B} _ {\text { inter }} ^ {T} \mathbf {t} d \Gamma \tag {3.6.3}
$$
식 (3.6.2)를 수치적분 식으로 다시 전개하면 다음과 같은 계면요소의 강성행렬의 식으로 나타낼 수 있다.
$$
\mathbf {K} _ {\text { inter }} = \sum_ {j = 1} ^ {N i p} \mathbf {B} _ {\text { inter }} ^ {j} {} ^ {T} \mathbf {D} \mathbf {B} _ {\text { inter }} ^ {j} \det \mathbf {J} ^ {j} \tag {3.6.4}
$$
여기서,
Nip : 계면요소에 대한 적분점의 수
# 3-7 계면요소 해석결과
계면요소의 해석 결과로는 절점에서의 계면력과 상대변위를 출력하며, 부호와 방향은 요소좌표계를 따른다. 계면력과 상대변위는 계면요소의 절점에서 정의되며, 한쌍을 이루는 두 절점사이의 결과값은 동일하다.
계면요소에서 출력되는 계면요소의 상대변위의 종류는 다음과 같다.
\- 계면력 성분
$$
t _ {x}, t _ {y}, t _ {z}
$$
• 상대변위 성분
$$
\Delta u _ {x}, \Delta u _ {y}, \Delta u _ {z}
$$
절점에서의 계면력과 상대변위는 뉴튼-코츠 적분법을 이용하였기 때문에 적분점에서 계산된 결과가 절점의 결과와 공유되어 산출된다. 계면요소의 적분점은 다음과 같다.
• 2절점 점계면요소 : 1절점 뉴튼-코츠 적분법
• 4절점 선계면요소 : 2 절점 뉴튼-코츠 적분법
- 6절점 선계면요소 : 3절점 뉴튼-코츠 적분법
- 6절점 삼각형 면계면요소 : 3절점 뉴튼-코츠 적분법
• 8절점 사각형 면계면요소 : 4절점 뉴튼-코츠 적분법
• 12절점 삼각형 면계면요소 : 6절점 뉴튼-코츠 적분법
• 16절점 사각형 면계면요소 : 8절점 뉴튼-코츠 적분법
# Chapter 4. Geometric Nonlinearity
# 4-1 개요
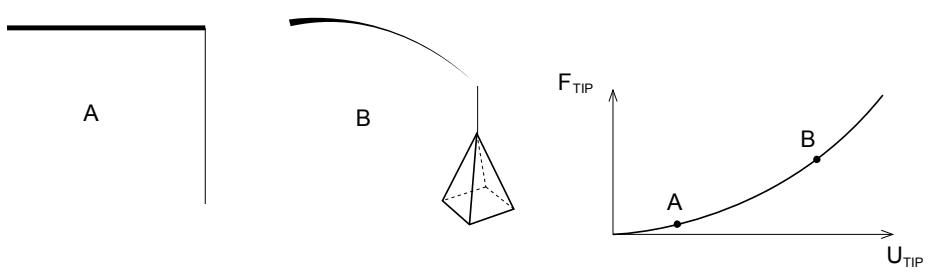
구조물에 변형 또는 회전이 크게 발생하면 기하학적 형상이 변하게 되며, 이로인해 변형률과 변위의 관계가 비선형이 될 수 있다. 그림 4.1.1에서 상태 (A)에있던 구조물이 하중(추)에 의해 상태 (B)와 같이 크게 변형된다면 하중에 대한변위의 상관 관계는 비선형이 된다.
text_image
A
B
F_TIP
A
B
U_TIP
그림 4.1.1 비선형 해석의 예시
기하비선형 해석에서는 변형이 생기는 동안 구조물의 기하학적 형상이 변하므로변형 전의 형상(초기 형상)과 변형 후의 형상은 서로 다르다는 가정을 이용하며,변형률과 회전이 미소하다는 가정은 이용하지 않는다. 따라서 기하비선형 해석에서 강성 행렬 (K) 는 변위 (u) 의 함수가 된다.
일반적으로 기하비선형 해석에서 사용하는 정식화 방법은 TLF(total Lagrangianformulation)와 ULF(updated Lagrangian formulation)이 있다. TLF에서 사용되는 응력과 변형률은 각각 PK2 응력(2nd Piola-Kirchhoff stress), Green 변형률(Green-Lagrange strain)이며, ULF에서 사용되는 응력과 변형률은 각각Cauchy 응력(Cauchy stress), 선형변형률증분(linear Euler strain increment)이다. TLF에서 변형률과 응력은 변형전의 형상에 대해 표현하며, ULF에서는 변형 후의 형상에 대해 표현한다. 예를 들어 1차원 해석의 경우에 PK2 응력은 힘과 변형전의 면적 (F / A0) 의 관계를 나타내나, Cauchy 응력은 힘과 변형 후 면적
( ) F / A 의 관계를 나타낸다.
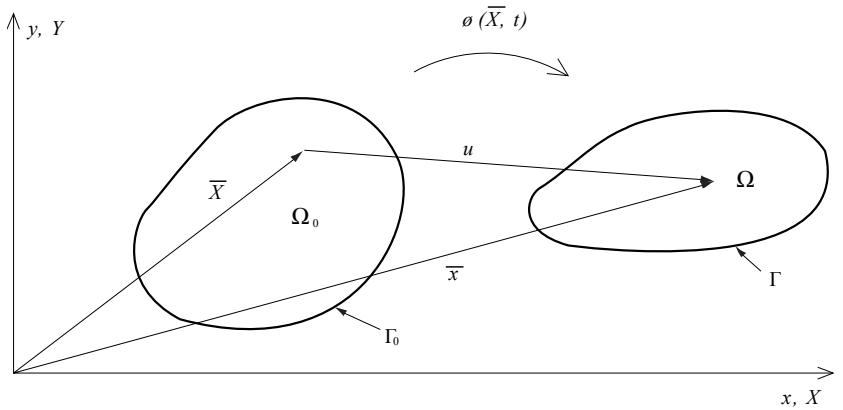
어떤 물체가 시간에 따라 변형을 일으키는 상태를 그림 4.1.2와 같이 나타낼 수있다. 그림 4.1.2에서 초기 상태(변형전의 상태)를 $\Omega _ { 0 }$ 로 표시하며, 현재 상태(변형후의 상태)를 Ω 로 표시하였다. 그리고 X 는 초기상태의 공간 좌표, x 는 t 만큼 시간이 경과된 후의 공간 좌표를 나타낸다.
text_image
y, Y
Ø (X̄, t)
u
X̄
Ω₀
x̄
Γ₀
Ω
Γ
x, X
그림 4.1.2 물체의 초기 및 현재 형상
Green 변형률은 다음 식 (4.1)과 같이 변형전의 좌표를 사용하여 정의한다.
$$
\begin{array}{l} \mathbf {E} = \frac {1}{2} \left(\mathbf {F} ^ {T} \mathbf {F} - \mathbf {I}\right) \text {or} E _ {i j} = \frac {1}{2} \left(u _ {i, j} + u _ {j, i} + u _ {k, i} u _ {k, j}\right) \\ \mathcal {O} (\overline {{{\mathbf {X}}}} _ {i, j}) \end{array} \tag {4.1.1}
$$
$$
\mathbf {F} = \frac {\partial \mathbf {x}}{\partial \overline {{\mathbf {X}}}} = \frac {\partial (\overline {{\mathbf {X}}} + \mathbf {u})}{\partial \overline {{\mathbf {X}}}} = \mathbf {I} + \frac {\partial \mathbf {u}}{\partial \overline {{\mathbf {X}}}}
$$
여기서,
E or $E _ { i j }$ : Green 변형률(Green-Lagrange strain)
F : 변형 구배(deformation gradient)
1차원 구조물의 경우에 식 (4.1.1)을 식 (4.1.2)와 같이 정리할 수 있다.
$$
E _ {1 1} = \frac {1}{2} \frac {L ^ {2} - \overline {{L}} ^ {2}}{\overline {{L}} ^ {2}} \tag {4.1.2}
$$
식 (4.1.2)에서 L 는 변형전의 길이, L 은 변형후의 길이를 표시한다. 식 (4.1.2)에서 변형이 미소하다면, Green 변형률은 식 (4.1.3)과 같이 선형 변형률로 회귀하는 것을 확인할 수 있다.
$$
\begin{array}{l} E _ {1 1} = \frac {1}{2} \frac {(L - \bar {L}) (L + \bar {L})}{\bar {L} ^ {2}} = \frac {1}{2} \frac {L - \bar {L}}{\bar {L}} \left(\frac {L - \bar {L}}{\bar {L}} + \frac {2 \bar {L}}{\bar {L}}\right) = \frac {1}{2} \left(\frac {L - \bar {L}}{\bar {L}}\right) ^ {2} + \frac {L - \bar {L}}{\bar {L}} \tag {4.1.3} \\ \cong \frac {L - \overline {{L}}}{\overline {{L}}} \\ \end{array}
$$
일반적인 3차원 연속체에서 PK2 응력의 의미를 알아보기 위해 Cauchy 응력과의 관계를 유도한다. 에너지는 Cauchy 응력 혹은 PK2 응력 등 어떤 응력을 사용하더라도 에너지는 동일하므로 가상 일은 식 (4.1.4)와 같다.
$$
r = \int \mathbf {S}: \delta \mathbf {E} d V _ {0} = \int \boldsymbol {\sigma}: \delta \boldsymbol {\varepsilon} d V = \int J \boldsymbol {\sigma}: \delta \boldsymbol {\varepsilon} d V _ {0}, \quad J = \det (\mathbf {F}) \tag {4.1.4}
$$
여기서,
S : PK2 응력 텐서
σ : Cauchy 응력 텐서
8 $\boldsymbol { \varepsilon } = \frac { 1 } { 2 } \big ( u _ { i } , _ { j } + u _ { j } , _ { i } \big )$
먼저 Green 변형률과 변형구배(deformation gradient)를 변분하면 각각 다음 식과 같다.
$$
\delta \mathbf {E} = \frac {1}{2} \left(\delta \mathbf {F} ^ {T} \mathbf {F} + \mathbf {F} ^ {T} \delta \mathbf {F}\right) \tag {4.1.5}
$$
$$
\delta \mathbf {F} = \frac {\partial \delta \mathbf {u}}{\partial \overline {{{\mathbf {X}}}}} = \frac {\partial \delta \mathbf {u}}{\partial \mathbf {x}} \frac {\partial \mathbf {x}}{\partial \overline {{{\mathbf {X}}}}} = \frac {\partial \delta \mathbf {u}}{\partial \mathbf {x}} \mathbf {F} \tag {4.1.6}
$$
식 (4.1.6)을 식 (4.1.5)에 대입하면, 아래 식과 같이 정리할 수 있다.
$$
\delta \mathbf {E} = \frac {1}{2} \left(\left(\frac {\partial \delta \mathbf {u}}{\partial \mathbf {x}} \mathbf {F}\right) ^ {T} \mathbf {F} + \mathbf {F} ^ {T} \left(\frac {\partial \delta \mathbf {u}}{\partial \mathbf {x}} \mathbf {F}\right)\right) = \mathbf {F} ^ {T} \left(\frac {1}{2} \left(\frac {\partial \delta \mathbf {u} ^ {T}}{\partial \mathbf {x}} + \frac {\partial \delta \mathbf {u}}{\partial \mathbf {x}}\right)\right) \mathbf {F} = \mathbf {F} ^ {T} \delta \boldsymbol {\varepsilon} \mathbf {F} \tag {4.1.7}
$$
식 (4.1.7)을 식 (4.1.4)에 대입하여 정리하면 식 (4.1.8)과 같다.
$$
r = \int \mathbf {S}: \delta \mathbf {E} d V _ {0} = \int \mathbf {S}: \left(\mathbf {F} ^ {T} \delta \boldsymbol {\varepsilon} \mathbf {F}\right) d V _ {0} = \int \mathbf {F} \mathbf {S} \mathbf {F} ^ {T}: \delta \boldsymbol {\varepsilon} d V _ {0} = \int J \boldsymbol {\sigma}: \delta \boldsymbol {\varepsilon} d V _ {0} \tag {4.1.8}
$$
따라서 Cauchy 응력과 PK2 응력의 관계를 식 (4.1.9)와 같이 표현할 수 있다.
$$
\boldsymbol {\sigma} = \frac {1}{J} \mathbf {F} \mathbf {S} \mathbf {F} ^ {T}, \quad \mathbf {S} = J \mathbf {F} ^ {- 1} \boldsymbol {\sigma} \mathbf {F} ^ {- T} \tag {4.1.9}
$$
시간 t t + ∆ 일때 가상 일의 정리를 PK2 응력과 Green 변형률로 표현하면 식(4.1.10)과 같다. 여기서, r 는 외부 힘에 의한 가상일이다.
$$
{ } ^ { t + \Delta t } r = \int ^ { t + \Delta t } S _ { i j } \delta ^ { t + \Delta t } E _ { i j } d V _ { 0 } \tag {4.1.10}
$$
$$
{ } ^ { t + \Delta t } S _ { i j } = { } ^ { t } S _ { i j } + \Delta S _ { i j }
$$
$$
{ } ^ { t + \Delta t } E _ { i j } = { } ^ { t } E _ { i j } + \Delta E _ { i j } \tag {4.1.11}
$$
$$
\delta^ {t + \Delta t} E _ {i j} = \frac {1}{2} \Big (\delta u _ {i, j} + \delta u _ {j, i} + ^ {t} u _ {k, i} \delta u _ {k, j} + \delta u _ {k, i} ^ {t} u _ {k, j} + \delta u _ {k, i} \Delta u _ {k, j} + \delta u _ {k, j} \Delta u _ {k, i} \Big)
$$
위 식 (4.1.11)을 (4.1.10)에 대입하여 정리하면 다음 식을 얻을 수 있다.
$$
\int \Delta S _ {i j} \delta e _ {i j} d V _ {0} + \int^ {t} S _ {i j} \delta \eta_ {i j} d V _ {0} = ^ {t + \Delta t} r - \int^ {t} S _ {i j} \delta e _ {i j} d V _ {0} \tag {4.1.12}
$$
여기서,
$$
\delta e _ {i j} \quad : \frac {1}{2} \left(\delta u _ {i, j} + \delta u _ {j, i} + ^ {t} u _ {k, i} \delta u _ {k, j} + \delta u _ {k, i} ^ {t} u _ {k, j}\right) \text { 선형항 }
$$
$$
\delta \eta_ {i j} \quad : \frac {1}{2} \left(\delta u _ {k, i} \Delta u _ {k, j} + \delta u _ {k, j} \Delta u _ {k, i}\right) \text { 비선형항 }
$$
∆Sij 는 테일러 급수를 이용하여 다음과 같이 전개한다.
$$
\Delta S _ {i j} = ^ {t + \Delta t} S _ {i j} - ^ {t} S _ {i j} = \left(^ {t} S _ {i j} + \frac {\partial^ {t} S _ {i j}}{\partial^ {t} E _ {k l}} \Delta E _ {k l} + h i g h o r d e r\right) - ^ {t} S _ {i j} \tag {4.1.13}
$$
식 (4.1.13)을 식 (4.1.12)의 첫 번째 항에 대입하고, ∆Ekl 의 2차 이상의 항을 무시하면, 첫 번째 항은 식 (4.1.14)와 같이 선형화된 식이 된다.
$$
\int \Delta S _ {i j} \delta e _ {i j} d V _ {0} = \int \left(\frac {\partial^ {t} S _ {i j}}{\partial^ {t} E _ {k l}} \Delta E _ {k l}\right) \delta e _ {i j} d V _ {0} = \int D _ {i j k l} \Delta E _ {k l} \delta e _ {i j} d V _ {0} \tag {4.1.14}
$$
$$
\Delta E _ {i j} = \Delta e _ {i j} = \frac {1}{2} \left(\Delta u _ {i, j} + \Delta u _ {j, i} + ^ {t} u _ {k, i} \Delta u _ {k, j} + \Delta u _ {k, i} ^ {t} u _ {k, j}\right)
$$
또한 $^{t}S_{ij} = ^{t}S_{ji}$ 인 성질을 이용하여 식 (4.1.12)의 두 번째 항을 정리하면 아래와 같다.
$$
\int^ {t} S _ {i j} \delta \eta_ {i j} d V _ {0} = \int^ {t} \mathbf {S}: (\delta \mathbf {L} ^ {T} \Delta \mathbf {L}) d V _ {0}, \quad L _ {i j} = \frac {\partial u _ {i}}{\partial X _ {j}} \tag {4.1.15}
$$
식 (4.1.12)의 우변에서 각 항은 식 (4.1.16)과 같이 표현할 수 있다.
$$
\begin{array}{l} ^ {t + \Delta t} r = \delta \mathbf {u} ^ {T} {} ^ {t + \Delta t} \mathbf {f} _ {\text {ext}} \\ \int_ {t} \mathbf {s} _ {t} \mathbf {s} _ {t} - \mathbf {W} _ {t} - \int_ {t} \mathbf {s} _ {t} \mathbf {s} _ {t} - \mathbf {W} _ {t} - \mathbf {s} _ {t} ^ {T} t \mathbf {s} _ {t} \end{array} \tag {4.1.16}
$$
$$
\int^ {t} S _ {i j} \delta e _ {i j} d V _ {0} = \int^ {t} \mathbf {S}: \delta \mathbf {e} d V _ {0} = \delta \mathbf {u} ^ {T} {} ^ {t} \mathbf {f} _ {\text { int }}
$$
여기서,
$$
\delta \mathbf {u} \quad : \left[ \begin{array}{l l l l l l l l l l l} \delta u _ {1} & \delta v _ {1} & \delta w _ {1} & \delta u _ {2} & \delta v _ {2} & \delta w _ {2} & \dots & \delta u _ {N} & \delta v _ {N} & \delta w _ {N} \end{array} \right] ^ {T}
$$
따라서 식 (4.1.12)의 우변항을 식 (4.1.16)을 이용해서 정리하면 다음 식 (4.1.17)과 같다.
$$
r - \int^ {t} \mathbf {S}: \delta \mathbf {e} d V _ {0} = \delta \mathbf {u} ^ {T} \left(^ {t + \Delta t} \mathbf {f} _ {e x t} - ^ {t} \mathbf {f} _ {\text {int}}\right) \tag {4.1.17}
$$
식 (4.1.12)에 식 (4.1.14–15,17)을 대입하면 식 (4.1.18)과 같다. 식 (4.1.18)에서 좌변의 첫째 항은 선형변형률에 의해 발생되는 가상 일이며, 두 번째 항은 비선형변형률에 의한 가상 일이다.
$$
\int \delta \mathbf {e} ^ {T} \mathbf {D} \Delta \mathbf {e} d V _ {0} + \int^ {t} \mathbf {S}: \delta \mathbf {L} ^ {T} \Delta \mathbf {L} d V _ {0} = \delta \mathbf {u} ^ {T} \left(^ {t + \Delta t} \mathbf {f} _ {\text { ext }} - ^ {t} \mathbf {f} _ {\text { int }}\right) \tag {4.1.18}
$$
식 (4.1.18)는 식 (4.1.19)과 같이 표현되며, 강성 행렬 $K_{L}^{e}$ 과 $K_{NL}^{e}$ 은 요소의 형상함수에 따라 결정되며 자세한 것은 다음 절을 참조하라.
$$
\left(^ {t} \mathbf {K} _ {L} ^ {e} + ^ {t} \mathbf {K} _ {N L} ^ {e}\right) \Delta \mathbf {u} = ^ {t + \Delta t} \mathbf {f} _ {e x t} - ^ {t} \mathbf {f} _ {\text {int}} \tag {4.1.19}
$$
# 4-2 트러스요소
트러스(Truss) 요소는 요소좌표계에서 이동변위 u , v , w 를 가지며, 변위는 형상함수 Ni 를 이용하여 다음과 같이 나타낸다.
$$
u = \sum_ {i = 1} ^ {N} N _ {i} u _ {i}, v = \sum_ {i = 1} ^ {N} N _ {i} v _ {i}, w = \sum_ {i = 1} ^ {N} N _ {i} w _ {i} \tag {4.2.1}
$$
트러스요소에서 사용되는 응력과 변형률은 다음 식 (4.2.2)과 같다
$$
\mathbf {S} = \left\{S _ {x x} \right\}, \quad \mathbf {E} = \left\{E _ {x x} \right\} \tag {4.2.2}
$$
여기서,
x : 요소 좌표계
식 (4.1.18)에서 가상 변형률의 선형 항 δe 는 다음과 같이 정리할 수 있다.
$$
\delta \mathbf {e} = \left\{\delta u _ {, x} \right\} + \left\{\delta u _ {, x} ^ {t} u _ {, x} + \delta v _ {, x} ^ {t} v _ {, x} + \delta w _ {, x} ^ {t} w _ {, x} \right\} \tag {4.2.3}
$$
식 (4.2.3)은 다음과 같이 가상변위 항 δu 와 행렬 BL 의 곱으로 표현된다.
$$
\delta \mathbf {e} = \mathbf {B} _ {L 0} \delta \mathbf {u} + \mathbf {B} _ {L 1} \delta \mathbf {u} = \mathbf {B} _ {L} \delta \mathbf {u} \tag {4.2.4}
$$
증분 변형률의 선형 항 역시 유사한 형태로 표현할 수 있다.
$$
\Delta \mathbf {e} = \mathbf {B} _ {L 0} \Delta \mathbf {u} + \mathbf {B} _ {L 1} \Delta \mathbf {u} = \mathbf {B} _ {L} \Delta \mathbf {u} \tag {4.2.5}
$$
식 (4.2.4)와 (4.2.5)에서 변위-변형률 관계행렬은 다음과 같다.
$$
\mathbf {B} _ {L 0} = \left\{N _ {1, x} \quad 0 \quad 0 \quad N _ {2, x} \quad 0 \quad 0 \right\} \tag {4.2.6}
$$
$$
\mathbf {B} _ {L 1} = \left\{^ {t} u _ {, x} N _ {1, x} \quad {} ^ {t} v _ {, x} N _ {1, x} \quad {} ^ {t} w _ {, x} N _ {1, x} \quad {} ^ {t} u _ {, x} N _ {2, x} \quad {} ^ {t} v _ {, x} N _ {2, x} \quad {} ^ {t} w _ {, x} N _ {2, x} \right\} \tag {4.2.7}
$$
식 (4.1.18)에서 가상 변형률의 비선형 항을 구성하는 δL 은 다음과 같다.
$$
\delta \mathbf {L} = \left\{\delta u _ {, x} \quad \delta v _ {, x} \quad \delta w _ {, x} \right\} ^ {T} \tag {4.2.8}
$$
식 (4.2.8)은 가상변위 항 δu 와 행렬 ${ \bf { B } } _ { N L }$ 의 곱으로 표현된다.
$$
\delta \mathbf {L} = \mathbf {B} _ {N L} \delta \mathbf {u} \tag {4.2.9}
$$
유사한 방법으로 ∆L 또한 다음과 같이 나타낼 수 있다.
$$
\Delta \mathbf {L} = \mathbf {B} _ {N L} \Delta \mathbf {u} \tag {4.2.10}
$$
${ \bf { B } } _ { N L }$ 은 다음과 같다.
$$
\mathbf {B} _ {N L} = \left[ \begin{array}{c c c c c c} N _ {1, x} & 0 & 0 & N _ {2, x} & 0 & 0 \\ 0 & N _ {1, x} & 0 & 0 & N _ {2, x} & 0 \\ 0 & 0 & N _ {1, x} & 0 & 0 & N _ {2, x} \end{array} \right] \tag {4.2.11}
$$
식 (4.2.4-5)와 (4.2.9-10)을 식 (4.1.19)에 대입하여 정리하면 선형화된 평형 방정식을 얻을 수 있다.
$$
\delta \mathbf {u} ^ {T} \left(^ {t} \mathbf {K} _ {L} ^ {e} + ^ {t} \mathbf {K} _ {N L} ^ {e}\right) \Delta \mathbf {u} = \delta \mathbf {u} ^ {T} \left(^ {t + \Delta t} \mathbf {f} _ {e x t} ^ {e} - ^ {t} \mathbf {f} _ {\text { int }} ^ {e}\right) \tag {4.2.12}
$$
식 (4.2.12)의 각 항은 다음과 같다.
$$
{ } ^ { t } \mathbf { K } _ { L } ^ { e } = \int _ { L _ { e } } A \mathbf { B } _ { L } ^ { T } \mathbf { D } \mathbf { B } _ { L } d L
$$
$$
{ } ^ { t } \mathbf { K } _ { N L } ^ { e } = \int _ { L _ { e } } A ^ { t } \mathbf { B } _ { N L } ^ { T } { } ^ { t } \hat { \mathbf { S } } ^ { t } \mathbf { B } _ { N L } d L \tag {4.2.13}
$$
$$
{ } ^ { t } \mathbf { f } _ { \text { i n t } } ^ { e } = \int _ { L _ { e } } A ^ { t } \mathbf { B } _ { L } ^ { T } { } ^ { t } \mathbf { S } d L
$$
여기서,
A : 단면적(section area)
응력 성분으로 구성된 행렬 t ˆS 는 다음과 같다.
$$
{ } ^ { t } \hat { \mathbf { S } } = \left[ \begin{array} { c c c } { } ^ { t } \mathbf { S } & \mathbf { 0 } & \mathbf { 0 } \\ \mathbf { 0 } & { } ^ { t } \mathbf { S } & \mathbf { 0 } \\ \mathbf { 0 } & \mathbf { 0 } & { } ^ { t } \mathbf { S } \end{array} \right] \quad { } ^ { t } \mathbf { S } = \left[ \begin{array} { c } { } ^ { t } S _ { x x } \end{array} \right] \tag {4.2.14}
$$
트러스요소의 해석 결과로는 선형 해석과 같이 절점 응력과 요소내력이 있으며,절점에서의 결과 이외에 적분점에서의 응력을 표를 통해 볼 수 있다.