# 1-2-4. 요소결과
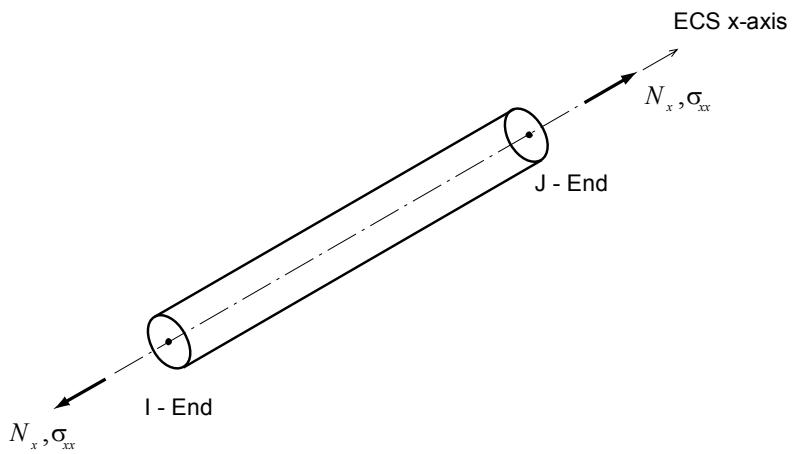
트러스요소의 해석결과로는 절점 1, 2 위치에서 요소내력(element force)과 응력을출력하고, 방향은 요소좌표계를 따른다. 출력되는 요소내력은 축방향의 힘( ) N A x xx= σ 이고, 그림 1.2.2와 같이 인장응력이 작용할 경우에 ‘+’ 부호를 갖는다.일반적으로 양 끝단에서의 요소내력은 동일하지만 자중이 입력된 경우에는 달라질수도 있다.
text_image
ECS x-axis
Nₓ,σₓ
J - End
I - End
Nₓ,σₓₓ
그림 1.2.2 트러스요소의 결과 출력위치 및 성분
# 1-3 보요소
# 1-3-1 개요
보요소는 2개의 절점에 의해 정의되는 선요소이며, 단면의 치수에 비하여 길이가 긴골조부재의 모델링에 주로 이용된다. 보요소는 정적(선형/비선형) 해석 및 동적 해석에 모두 이용할 수 있으며, 축방향(axial) 변형, 휨(bending), 비틀림(torsion), 전단(shear) 변형 등을 고려할 수 있다. 보요소에서 변형을 정의하는 응력, 변형률, 요소내력(element force)은 다음과 같다.
$$
\boldsymbol {\sigma} = \left\{\sigma_ {x x} \right\}, \boldsymbol {\varepsilon} = \left\{\varepsilon_ {x x} \right\}
$$
(축방향 응력과 변형률)
$$
\mathbf {M} = \left\{ \begin{array}{l} M _ {y} \\ M _ {z} \end{array} \right\}, \quad \mathbf {K} = \left\{ \begin{array}{l} \kappa_ {y} \\ \kappa_ {z} \end{array} \right\}
$$
(휨모멘트와 곡률)
$$
\mathbf {T} = \left\{M _ {x} \right\}, \quad \boldsymbol {\varphi} = \left\{\phi_ {x} \right\}
$$
(비틀림모멘트와 비틀림)
$$
\mathbf {Q} = \left\{ \begin{array}{l} Q _ {y} \\ Q _ {z} \end{array} \right\}, \quad \boldsymbol {\gamma} = \left\{ \begin{array}{l} \gamma_ {x y} \\ \gamma_ {z x} \end{array} \right\}
$$
(전단력과 전단변형률)
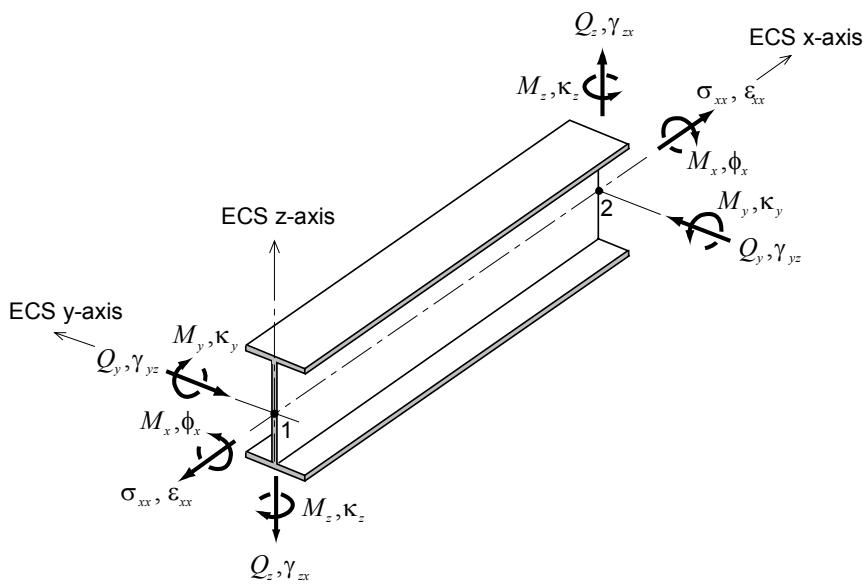
요소내력과 응력에 대한 부호규약은 그림 1.3.1과 같고, 화살표 방향이 ‘+’ 부호를의미한다. 길이에 대한 단면의 폭 또는 높이비가 대략 1/5 보다 커질 경우에는 전단변형에 의한 영향이 커지게 되므로, 보요소를 사용하지 않고 판요소나 입체요소를 사용하는 것이 바람직하다.
text_image
ECS x-axis
ECS y-axis
ECS z-axis
1
2
Qz,γzx
Mz,κz
σxx,εxx
My,κy
My,φx
My,φx
Qy,γyz
Qy,γyz
My,κy
My,φx
σxx,εxx
Mx,φx
Mz,κz
Qz,γzx
그림 1.3.1 보요소의 좌표계와 응력/변형률/내력
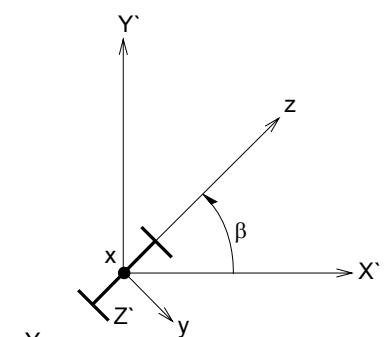
보요소 좌표계는 요소내력 또는 응력의 출력 기준이 되고, 특히 보요소의 전단강성과휨강성의 방향을 정하는 기준이 된다. 요소좌표계의 x 축은 절점 1에서 절점 2로 진행하는 방향이 되고, y z, 축의 방향은 그림 1.3.1과 같고, 그림 1.3.2 \~ 1.3.4와 같이3가지 방법을 사용하여 지정한다. 요소좌표계 z 축을 정하면 y 축은 오른손법칙에따라 자동적으로 정해진다.
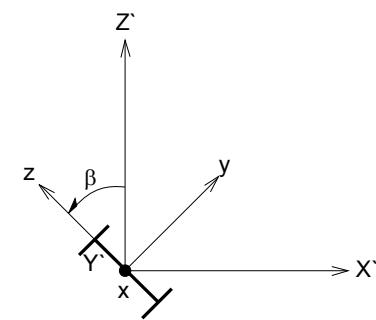
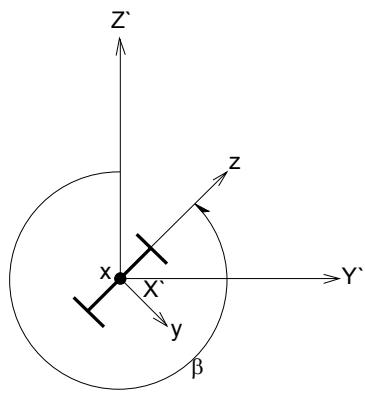
그림 1.3.2는 요소좌표계 z 축과 전체좌표계와의 각도인 “Beta Angle” β를 입력하여 z 축을 입력하는 방법이다. 요소좌표계 x 축이 전체좌표계 Z 축과 평행하면β이 전체좌표계 Z 축과 평행하지 않으면 β 는 전체좌표계 Z 축과 요소좌표계 x − z평면이 이루는 수직각도가 된다.
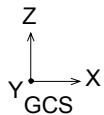
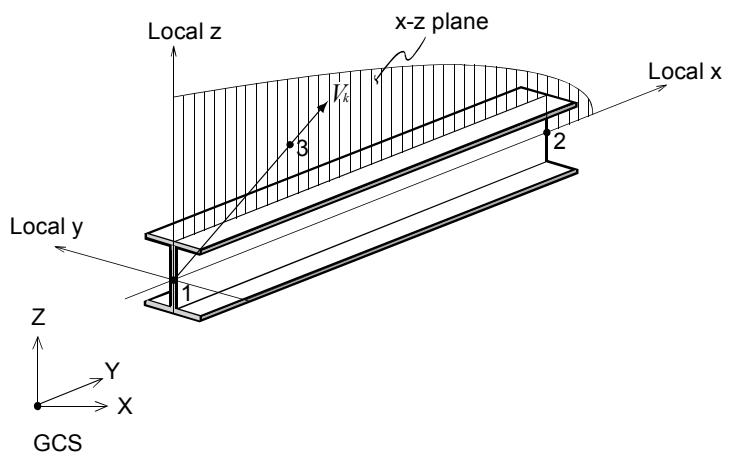
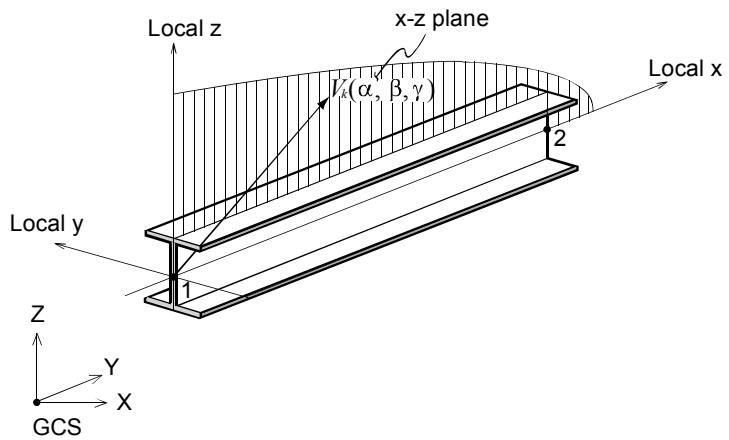
그림 1.3.3은 요소좌표계 x− z 평면상의 임의의 절점을 입력하여 요소좌표계를 지정하는 방법이다. 입력되는 임의의 절점은 요소좌표계 x 축 선상에 있지 않아야 한다.그림 1.3.4는 요소좌표계 x − z 평면상에 임의의 벡터를 입력하여 요소좌표계를 지정하는 방법이다. 입력되는 임의의 벡터는 요소좌표계 x 축과 평행하지 않아야 한다.
text_image
Y'
z
x
β
Z'
y
X'
X′: axis passing through node N1 and parallel with the global X-axis
Y′: axis passing through node N1 and parallel with the global Y-axis
Z′: axis passing through node N1 and parallel with the global Z-axis
(a) 수직부재인 경우 (요소좌표계 x축이 전체좌표계 Z축과 평행할 경우)
text_image
z
β
y
x
Y
z'
text_image
Z'
z
x
X'
y
Y'
β
(b) 수평 또는 대각부재인 경우 (요소좌표계 x축이 전체좌표계 Z축과 평행하지 않을 경우)
그림 1.3.2 Beta Angle을 이용한 요소좌표계 정의
text_image
Local z
x-z plane
Vz
3
2
Local x
Local y
1
Z
Y
X
GCS
그림 1.3.3 Node를 사용한 요소좌표계 정의
text_image
Local z
x-z plane
V(α, β, γ)
Local x
Local y
1
2
Z
Y
X
GCS
그림 1.3.4 K-Vector 를 사용한 요소좌표계의 정의
# 1-3-2 유한요소 정식화
보요소의 단면 형상과 크기는 전체 길이에서 균일하다고 가정한다. 보요소는 요소좌표계에서 3개의 이동변위(translation)와 3개의 회전변위(rotation)를 모두 갖는다. 축방향 변형에 대한 강성은 트러스요소와 동일한 방법으로 계산하며, 비틀림 강성 또한유사한 과정으로 계산할 수 있다. 그리고 휨과 전단강성에 대해서는 Timoshenko 보이론 또는 Euler 보이론을 사용한다
축방향 변형에 대해서는 트러스요소와 동일한 방법을 적용한다.
$$
\mathbf {u} _ {i} = \left\{u _ {i} \right\} \tag {1.3.1}
$$
$$
\mathbf {K} _ {\text { axial }} = \frac {E A}{L _ {e}} \left[ \begin{array}{l l} 1 & - 1 \\ - 1 & 1 \end{array} \right] \tag {1.3.2}
$$
여기서,
$$
\begin{array}{l} A \quad : \text { 단면적 } \\ L _ {e} \quad : \text { 요소 길이 } \\ \end{array}
$$
비틀림에 대해서도 유사한 과정을 거쳐 다음과 같은 강성행렬을 얻을 수 있다.
$$
\mathbf {u} _ {i} = \left\{\theta_ {x i} \right\} \tag {1.3.3}
$$
$$
\mathbf {K} _ {\text { torsional }} = \frac {G I _ {x}}{L _ {e}} \left[ \begin{array}{l l} 1 & - 1 \\ - 1 & 1 \end{array} \right] \tag {1.3.4}
$$
여기서,
$$
\begin{array}{l} I _ {x} \quad : \text { 비틀림강성 (torsional resistance) } \\ L _ {e} \quad : \text { 요소 길이 } \\ \end{array}
$$
전단과 휨 강성은 서로 연관되어 있으므로 연관강성을 구성한다. 먼저 Timoshenko보이론에 기반하여 전단변형을 고려한 강성에 대하여 설명한다. 요소좌표계의 x − z평면 상에서 전단변형과 휨을 표현하는 변위는 z 방향 이동변위 w 와 y 축에 대한회전이다.
$$
\mathbf {u} _ {i} = \left\{w _ {i} \quad \theta_ {y i} \right\} ^ {T} \tag {1.3.5}
$$
요소의 축방향으로 임의의 좌표 x와 이동변위 w는 다음과 같이 나타낼 수 있다.
$$
x = \sum_ {i = 1} ^ {2} N _ {i} x _ {i}, \quad w = \sum_ {i = 1} ^ {2} N _ {i} w _ {i} \tag {1.3.6}
$$
요소좌표계의 y 축에 대한 회전은 다음과 같이 2차로 표현된다.
$$
\theta_ {y} = \sum_ {i = 1} ^ {2} N _ {i} \theta_ {y i} + P _ {3} \Delta \theta_ {y 3} \tag {1.3.7}
$$
$$
N _ {1} = \frac {1 - \xi}{2}, \quad N _ {2} = \frac {1 + \xi}{2}, \quad \mathrm{P} _ {3} = 1 - \xi^ {2} \quad (- 1 \leq \xi \leq 1) \tag {1.3.8}
$$
요소 중앙의 가상 절점 회전각 $\Delta\theta_{y3}$ 를 구하기 위하여 다음과 같은 가정을 이용한다.
\- 전단력과 힘모멘트의 평형식을 만족한다.
$$
Q _ {z} = - \frac {\partial M _ {y}}{\partial x} \tag {1.3.9}
$$
\- 전단력과 휩모멘트의 평형식에 의해 계산되는 평균 전단변형률 $\overline{\gamma}_{zx}$ 는 형상함수로부터 계산되는 전단변형률 $\gamma_{zx}$ 와 다음의 관계를 만족한다.
$$
\int_ {L _ {e}} \left(\gamma_ {z x} - \overline {{\gamma}} _ {z x}\right) d L = 0 \tag {1.3.10}
$$
위의 가정을 이용하면 중앙 가상 절점의 회전각 $\Delta\theta_{y3}$ 를 다음처럼 표현할 수 있다.
$$
\Delta \theta_ {y 3} = \frac {3}{2 L _ {e} (1 + \phi_ {3})} \left[ \begin{array}{l l l l} 1 & - \frac {L _ {e}}{2} & - 1 & - \frac {L _ {e}}{2} \end{array} \right] \left\{ \begin{array}{l} w _ {1} \\ \theta_ {y 1} \\ w _ {2} \\ \theta_ {y 2} \end{array} \right\}, \quad \phi_ {3} = \frac {1 2 E I _ {y}}{G A _ {s z} L _ {e} ^ {2}} \tag {1.3.11}
$$
$A_{sz}$ : 유효전단면적 (effective shear area)
$I_{y}$ : 단면2차 모멘트 (area moment of inertia)
절점 변위와 곡률 κ y 의 관계는 Bbi에 의해 다음과 같이 표현된다.
$$
\kappa_ {y} = \sum_ {i = 1} ^ {2} \mathbf {B} _ {b i} \mathbf {u} _ {i} \tag {1.3.12}
$$
$$
\mathbf {B} _ {b i} = \left\{\frac {3 a _ {i}}{2 L _ {e} (1 + \phi_ {3})} \frac {\partial P _ {3}}{\partial x} \quad \frac {3}{4 (1 + \phi_ {3})} \frac {\partial P _ {3}}{\partial x} - \frac {\partial N _ {i}}{\partial x} \right\}, \quad a _ {1} = - 1, \quad a _ {2} = 1 \tag {1.3.13}
$$
전단변형은 zxγ 를 이용하며, zxγ 와 절점 변위와의 관계는 Bsi 에 의해 다음과 같이나타낼 수 있다.
$$
\overline {{\gamma}} _ {z x} = \sum_ {i = 1} ^ {2} \mathbf {B} _ {s i} \mathbf {u} _ {i} \tag {1.3.14}
$$
$$
\mathbf {B} _ {s i} = \left\{\frac {a _ {i}}{L _ {e} (1 + \phi_ {3})} \quad \frac {L _ {e}}{2 (1 + \phi_ {3})} \right\}, \quad a _ {1} = - 1, \quad a _ {2} = 1 \tag {1.3.15}
$$
따라서 전단과 휨 강성은 다음과 같이 계산할 수 있다.
$$
\mathbf {K} _ {i j} = \int_ {L _ {e}} \left(\mathbf {B} _ {b i} ^ {T} \mathbf {D} _ {b} \mathbf {B} _ {b j} + \mathbf {B} _ {s i} ^ {T} \mathbf {D} _ {s} \mathbf {B} _ {s j}\right) d L \tag {1.3.16}
$$
$$
\mathbf {D} _ {b} = I _ {y} \left\{E \right\}, \quad \mathbf {D} _ {s} = A _ {s y} \left\{G \right\} \tag {1.3.17}
$$
식 (1.3.16)을 적분하여 정리하면, x − z 평면의 휨과 전단에 대한 강성을 계산할 수있고, 행렬식으로 표현하면 다음과 같다.
$$
\mathbf {K} _ {\text {bending}} + \mathbf {K} _ {\text {shear}} = \frac {E I _ {y}}{1 + \phi_ {3}} \left[ \begin{array}{c c c c} \frac {1 2}{L _ {e} ^ {3}} & - \frac {6}{L _ {e} ^ {2}} & - \frac {1 2}{L _ {e} ^ {3}} & - \frac {6}{L _ {e} ^ {2}} \\ & \frac {4}{L _ {e}} \left(1 + \frac {\phi_ {3}}{4}\right) & \frac {6}{L _ {e} ^ {2}} & \frac {2}{L _ {e}} \left(1 - \frac {\phi_ {3}}{2}\right) \\ & & \frac {1 2}{L _ {e} ^ {3}} & \frac {6}{L _ {e} ^ {2}} \\ \text {Symm.} & & & \frac {4}{L} \left(1 + \frac {\phi_ {3}}{4}\right) \end{array} \right] \tag {1.3.18}
$$
요소좌표계의 x − y 평면에 대한 휨과 전단 강성은 동일한 방법으로 계산할 수 있다.전단변형을 고려하지 않는 Euler 보이론에 의한 강성을 계산하려면, 전단변형률의 가
정인 식 (1.3.10) 대신 다음의 식을 이용하여 정식화한다.
$$
\int_ {L _ {e}} \gamma_ {z x} d L = 0 \tag {1.3.19}
$$
따라서, 식 (1.3.18)에서 $\phi_{3}=0$ 으로 두면 힘 강성을 얻을 수 있다.
# 1-3-3. 하중과 질량
보요소에 적용되는 하중은 보요소 하중(beam load), 체적력(body force), 프리스트레스하중(prestress load), 온도하중(thermal load) 등이 있다. 체적력은 요소의 자중이나 관성력을 표현하는 하중이고, 보요소 하중은 보요소의 길이에 따라 작용하는 집중 또는 분포하중이다. 보요소 하중에는 집중하중과 분포하중이 있고, 요소좌표축과 전체좌표축 방향으로 입력할 수 있다. 프리스트레스 하중은 보요소에 내력으로 인정 변형을 주고자 하는 경우에 사용한다. 프리스트레스 하중은 요소 좌표계의 길이 방향으로 작용하며, 요소의 두 절점이 구속된 경우에 입력한 프리스트레스 하중이 요소내력과 같도록 하는 하중을 도입한다. 보요소의 온도하중에는 길이방향 열 변형하중과 온도구배(temperature gradient)와 같은 휩 하중이 있다.
# • 보요소 하중
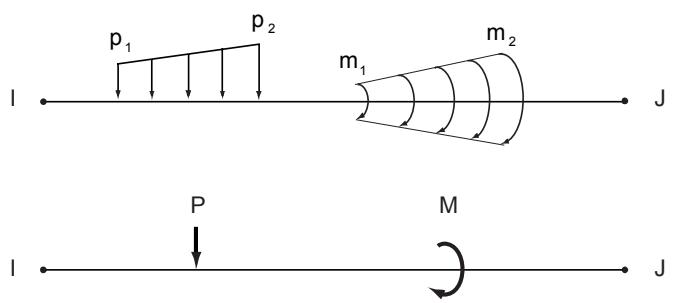
보요소의 두 절점사이에 입력되는 집중 또는 분포하중이다. 하중 재하 구간은 사용자가 임의로 입력할 수 있고, 해석 시에는 등가 절점하중으로 변환하여 사용한다. 보요소 하중은 요소내력 계산시에 반영하며, 요소내력은 부재 내부의 지정된 위치(I-end, 1/4, 1/2, 3/4, J-end)에서 정확하게 계산된다. 그림 1.3.5는 보요소 하중의 입력 예를 나타내고 있다.
Part 1 Element Library
text_image
p₁ p₂
m₁ m₂
I J
P M
I J
(a) 보요소 하중의 종류(분포하중, 집중하중)
text_image
W
L
θ
Z
X
W
L
θ
Z
X
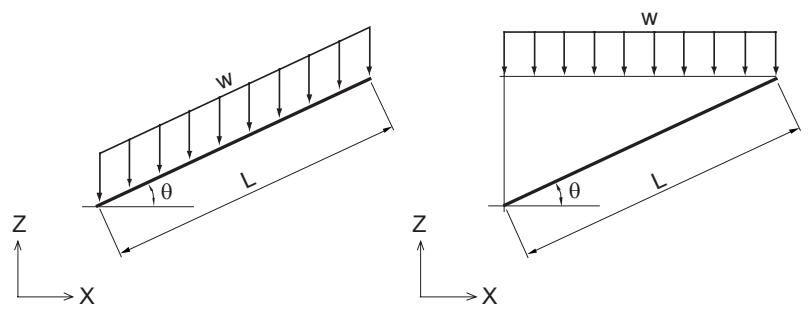
(b) 전체좌표축에 대한 투영(Projection) 여부에 따른 분포하중의 계산
그림 1.3.5 보요소 하중의 입력 예