$$
[ A ] = \left( \begin{array}{c c c c c c} 1 & - 0. 5 & - 0. 5 & 0 & 0 & 0 \\ - 0. 5 & 1 & - 0. 5 & 0 & 0 & 0 \\ - 0. 5 & - 0. 5 & 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 3 & 0 & 0 \\ 0 & 0 & 0 & 0 & 3 & 0 \\ 0 & 0 & 0 & 0 & 0 & 3 \end{array} \right) \tag {5.4.25}
$$
# 5.4.4 응답 스펙트럼
응답 스펙트럼 해석(response spectrum analysis)은 지반운동(base motion: 경계조건으로 구속된 절점들의 동일한 흔들림), 특히 지진에 의한 구조물의 응답을평가하기 위한 방법중 하나로 내진설계시 사용하는 가장 보편화된 해석방법이다.이 방법은 시스템의 응답을 선형으로 가정하여 최대응답만을 평가하는 기법이기때문에 비선형성이 지배적이거나 특정시간스텝의 동시성을 고려한 결과가 중요한 문제에 대해서는 5.4.1절이나 5.7절의 시간적분법을 이용한 해석이 적절하다.최대응답은 미리 정의된 스펙트럼 함수에 상응하는 모드별 응답에 모드 참여율을 고려한 모드조합으로 평가된다. 여기서, 모드별 최대응답의 동시성은 고려하지 않고 모드별 응답의 최대값을 조합방법을 통하여 최대응답을 계산하기 때문에 응답 스펙트럼 해석결과는 시간적분법에 대한 근사해라고 볼 수 있다. 따라서, 스펙트럼 함수를 특정 가진 가속도 혹은 특정 지진파에 대해서 정의한다면응답 스펙트럼 해석의 결과는 해당 입력 가속도에 대한 선형 과도응답 해석결과의 근사 최대값을 얻을 수 있다. 하지만, 특정지역이나 국가에 발생한 역사지진파를 통계하여 만들어진 설계 응답 스펙트럼을 사용하여 내진설계를 위한 해석결과를 얻는 경우가 더 일반적이다.
• 모드별 스펙트럼 응답
응답 스펙트럼 해석을 위한 동적 평형방정식은 (5.3.6)과 같으며, 모드별 최대응답은 스펙트럼 데이터를 이용해 다음과 같이 쓸 수 있다.
$$
\xi_ {i} ^ {\max} = \max \left[ \xi_ {i} (t) \right] = \Gamma_ {i} S _ {D} \left(\omega_ {i}, \zeta_ {i}\right)
$$
$$
\dot {\xi} _ {i} ^ {\max} = \max \left[ \dot {\xi} _ {i} (t) \right] = \Gamma_ {i} S _ {V} \left(\omega_ {i}, \zeta_ {i}\right) \tag {5.4.26}
$$
$$
\ddot {\xi} _ {i} ^ {\max} = \max \left[ \ddot {\xi} _ {i} (t) \right] = \Gamma_ {i} S _ {A} \left(\omega_ {i}, \zeta_ {i}\right)
$$
$S_{D}(\omega_{i},\zeta_{i})$ : 변위 스펙트럼 데이터
$S_{V}(\omega_{i},\zeta_{i})$ : 속도 스펙트럼 데이터
$S_{A}(\omega_{i},\zeta_{i})$ : 가속도 스펙트럼 데이터
$\Gamma_{i}$ : i 번째 모드의 방향별 참여계수
(5.4.26)을 (5.3.5)에 대입하면 모드별 변위, 속도, 가속도 최대값 기여도를 스펙트럼 데이터에 대한 식으로 표현할 수 있다.
$$
u _ {i} ^ {\max} = \phi_ {i} \Gamma_ {i} S _ {D} (\omega_ {i}, \zeta_ {i}) = \phi_ {i} \Gamma_ {i} S _ {A} (\omega_ {i}, \zeta_ {i}) / \omega_ {i} ^ {2}
$$
$$
v _ {i} ^ {\max} = \phi_ {i} \Gamma_ {i} S _ {V} \left(\omega_ {i}, \zeta_ {i}\right) = \phi_ {i} \Gamma_ {i} S _ {A} \left(\omega_ {i}, \zeta_ {i}\right) / \omega_ {i} \tag {5.4.27}
$$
$$
a _ {i} ^ {\max} = \phi_ {i} \Gamma_ {i} S _ {A} \left(\omega_ {i}, \zeta_ {i}\right)
$$
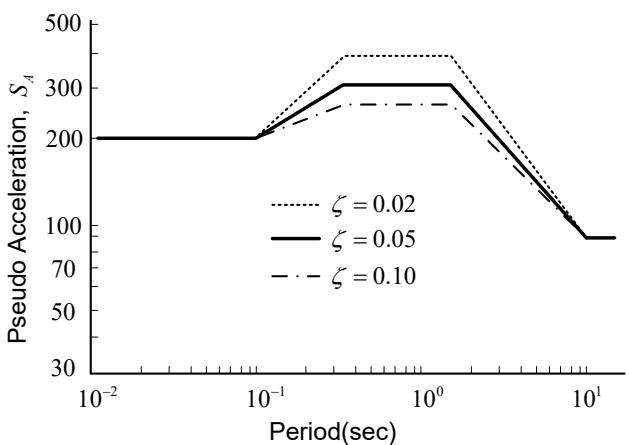
스펙트럼 데이터의 한 점은 고유주기(혹은 고유주파수)에 대한 모드별 절대최대 응답값으로 정의되며, 모드 감쇠비에 따른 영향을 포함한다. 특정 가속도 이력에 대한 응답스펙트럼은 주기별 최대응답의 크기가 매우 다양하기 때문에 매우 복잡한 형태의 그래프로 표현되지만, 설계 응답스펙트럼의 경우에는 그림 5.4.3처럼 로그 스케일상에서 단순한 직선의 조합형태로 표현되는 것이 일반적이다.
line
| Period(sec) | ζ = 0.02 | ζ = 0.05 | ζ = 0.10 |
| ----------- | -------- | -------- | -------- |
| 0.01 | 200 | 200 | 200 |
| 0.1 | 200 | 200 | 200 |
| 1 | 350 | 300 | 250 |
| 10 | 100 | 100 | 100 |
그림 5.4.3 가속도 응답스펙트럼 예
• 모드조합(Modal combination) 방법
모드별 최대 물리량(변위, 응력, 부재력, 반력 등의 각 성분별 최대값)을라고 하고, 실제 물리량의 최대값이 각 모드의 최대값의 합이라고가정한다면 각 모드의 최대값을 더하면 되겠지만, 각 모드의 최대값이 동일한시간스텝에 발생한다는 보장이 없기 때문에 단순 선형중첩만으로는 모드별최대값에서 실제 물리량의 최대값을 표현하기에는 무리가 있다.
$$
R _ {\max} \neq \sum_ {i = 1} ^ {N} R _ {i} ^ {\max} \tag {5.4.28}
$$
따라서, 근사적으로 최대값을 평가할 수 있는 모드조합 방법의 도입이 필요하다.모드 간의 간섭 특성이나 감쇠의 영향 등을 고려한 여러가지 모드조합 방법이제안되었지만 모든 경우에 대해서 적절한 근사값을 주는 방법은 없기 때문에제안된 여러가지 모드조합 방법들의 특성을 잘 파악할 필요가 있다.
① Summation of the absolute value (ABS)
$$
R _ {\max} = \sum_ {i = 1} ^ {N} \left| R _ {i} ^ {\max} \right| \tag {5.4.29}
$$
이 방법은 모든 모드별 응답이 동일한 위상을 가진다는 가정으로 모드별 절대 최대값이 모두 동일한 시간에 발생한다고 판단하므로 가장 보수적인 결과를 제공한다.
② Square root of the summation of the squares (SRSS)
$$
R _ {\max} = \sqrt {\sum_ {i = 1} ^ {N} \left(R _ {i} ^ {\max}\right) ^ {2}} \tag {5.4.30}
$$
이 방법은 각 모드가 충분히 분리되어있는 경우에 적절한 결과를 제공한다.
③ Naval research laboratory method (NRL)
$$
R _ {\max} = \left| R _ {m} ^ {\max} \right| + \sqrt {\sum_ {i = 1 , i \neq m} ^ {N} \left(R _ {i} ^ {\max}\right) ^ {2}} \tag {5.4.31}
$$
이 방법은 SRSS 방법에서 절대 최대값을 가지는 모드(m) 하나만 분리한 형태이다. SRSS 방법과 마찬가지로, 각 모드가 충분히 분리되어있는 경우에 적절한 결과를 제공한다.
위의 방법들은 모드가 인접되어있지 않고 충분히 분리되어있는 경우에만 유효하므로, 미국 원자력 규제 위원회 (NRC)의 regulatory guide 1.92(1976)에서는 여러 모드가 인접한 경우에 대해서도 최대값을 적절하게 평가할 수 있는 방법들을 제안하고 있다.
④ Ten percent method (TENP)
$$
R _ {\max} = \sqrt {\sum_ {i = 1} ^ {N} \left(R _ {i} ^ {2} + 2 \sum_ {j = 1} ^ {i - 1} \left| R _ {i} R _ {j} \right|\right)} \tag {5.4.32}
$$
이 방법은 SRSS 방법에 10% 이내로 인접한 주파수의 모든 모드들에 대한 영향을 포함시킨 방법이다. 여기서 두 모드 i,j (j
형상 등 방향성을 가지는 결과에 대해서는 적절한 부호를 가질 필요가 있다.조합된 결과의 부호를 결정하는 방법 중에 가장 보편적인 방법은주요모드(major mode)의 부호를 따라가는 것이다. 주요모드는 방향성분별로질량참여율이 가장 큰 모드들 중에서 스펙트럼이 정의된 방향(하중방향)과 가장근접한 방향에 해당하는 모드로 정의된다.
# • 스펙트럼 데이터의 보정
스펙트럼 데이터는 (5.4.26)에서도 알 수 있듯이, 고유 주파수와 모드 감쇠비에대한 함수형태이다. 하지만, 사용자가 해석을 수행하기 전에 주파수를 알 수없다는 문제 때문에 스펙트럼 데이터는 일정한 간격을 가진 테이블 형태로정의된다. 따라서, 구조물의 해당 주파수나 주기에 해당하는 스펙트럼값을 읽을때는 보간(interpolation) 방법을 사용하게 되는데 고유주기 변화에 대한스펙트럼 응답을 가장 잘 표현하는 로그선형보간(linear interpolation on alogarithmic scale)을 사용하는 것이 일반적이다. 스펙트럼 데이터를 여러감쇠비에 대해서 작성하여 입력한 경우도 구조물의 모드 감쇠비에 대해서 고유주파수와 동일한 방법으로 로그선형보간을 수행한다.
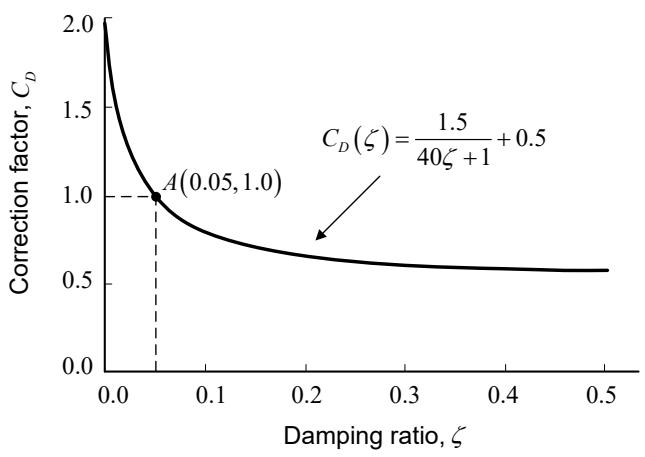
하지만, 스펙트럼 데이터를 한 개의 감쇠비에 대해서만 작성한 경우에는 보간할수 있는 데이터가 없기 때문에, 한 개의 감쇠비에 대한 특별한 보정방법이필요하다. 일본도로교시방서(2002)에서는 (5.4.37)과 같이 감쇠비에 대한보정계수(correction factor)를 제안하고 있다.
$$
C _ {D} (\zeta) = \frac {1 . 5}{4 0 \zeta + 1} + 0. 5 \tag {5.4.37}
$$
line
| Damping ratio, ζ | Correction factor, C_D |
| ---------------- | ---------------------- |
| 0.05 | 1.0 |
그림 5.4.4 감쇠계수별 보정계수
감쇠비가 0.05 일 때 $C_{D}=1$ 이므로(점 A), (5.4.37)은 스펙트럼데이터의 감쇠비가 0.05 일때의 보정계수임을 내포하고 있다. 따라서, 스펙트럼데이터의 감쇠비가 0.05 가 아닌 경우에는 (5.4.38)처럼 각 감쇠에 해당하는 보정계수의 비율을 최종 감쇠 보정계수로 적용한다.
$$
\overline {{{R}}} _ {i} ^ {\max} = \frac {C _ {D} \left(\zeta_ {i}\right)}{C _ {D} \left(\zeta_ {\text { spectrum }}\right)} R _ {i} ^ {\max} \tag {5.4.38}
$$
# 5.5 비선형 유한요소 해법
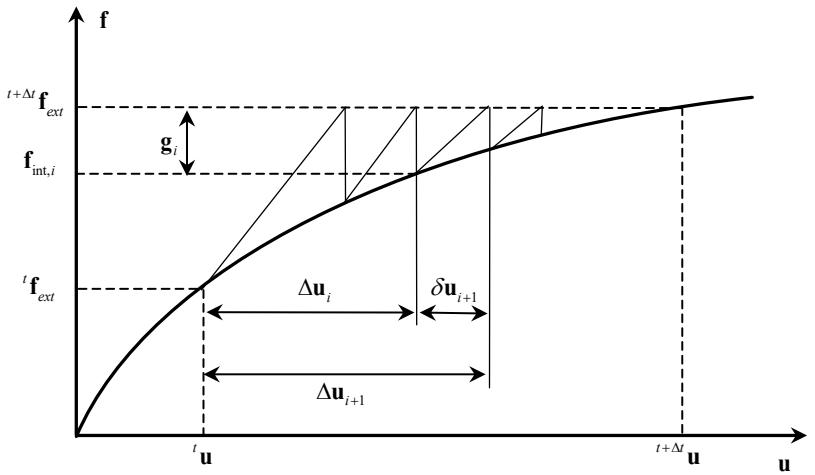
비선형 유한요소 해법은 반복계산의 누적 증분해(incremental solution)가 정해에 수렴하도록 하는 방법이며 그림 5.5.1에서 그려진 바와 같이 진행된다.
line
| u | f |
|---------|---------|
| t | f_ext |
| t+Δt | f_ext |
| g_i | f_int,i |
| Δu_i | f_ext |
| δu_{i+1} | f_ext |
| Δu_{i+1} | f_ext |
| t+Δt | f_ext |
그림 5.5.1 누적 증분해와 비선형 유한요소법의 수렴 과정
그림에서, $^{t}f_{ext}$ 와 $^{t+\Delta t}f_{ext}$ 는 각각 시간 t 와 시간 $t+\Delta t$ 에서의 외력을 의미하고, 시간 t 와 시간 $t+\Delta t$ 사이에서의 해와 증분해는 다음과 같은 관계로 표시될 수 있다.
$$
{ } ^ { t + \Delta t } \mathbf { u } = { } ^ { t } \mathbf { u } + \Delta \mathbf { u } \tag {5.5.1}
$$
Δu : 시간 증분 Δt 사이에 발생하는 증분해
시간 증분 $\Delta t$ 구간에서 비선형 해석을 위한 반복계산이 이루어지면 증분해의 누적은 다음과 같다.
$$
\Delta \mathbf {u} = \sum_ {i = 1} ^ {n} \delta \mathbf {u} _ {i} \quad \text { or } \quad \Delta \mathbf {u} _ {i + 1} = \Delta \mathbf {u} _ {i} + \delta \mathbf {u} _ {i + 1} \tag {5.5.2}
$$
$\Delta u_{i}$ : i 번째 반복계산까지 발생한 누적 증분해
$\delta\mathbf{u}_{i+1}$ : $i+1$ 번째 반복계산에서 발생한 증분해
$\delta\mathbf{u}_{i+1}$ 는 접선강성행렬 (tangential stiffness matrix) $\mathbf{K}_{i+1}$ 을 사용하여 다음과 같이
선형 연립방정식을 통해 계산된다.
$$
\delta \mathbf {u} _ {i + 1} = \mathbf {K} _ {i + 1} ^ {- 1} \mathbf {g} _ {i} \tag {5.5.3}
$$
$g_{i}$ : 불평형력 (residual force, unbalance force)
불평형력 $g_{i}$ 는 다음과 같이 외력 $t+\Delta t f_{ext}$ 과 내력 $f_{int,i}$ 의 차이로 표현된다.
$$
\mathbf {g} _ {i} = ^ {t + \Delta t} \mathbf {f} _ {\text { ext }} - \mathbf {f} _ {\text { int }, i} \tag {5.5.4}
$$
반복계산 과정 (5.5.2)-(5.5.4)는 사용자가 지정한 수렴조건(convergence criteria)을 만족할 때까지 반복되며, 수렴조건은 부재력, 변위 또는 에너지 등의 변화량으로 판단한다.
# - 선탐색 (Line search)
midas NFX에서는 위에 설명된 기본적인 반복해법의 성능 향상을 위하여 선탐색 기능을 제공한다. 선탐색의 기본적인 개념은 (5.5.3)에서 계산된 증분해 $\delta u_{i+1}$ 를 누적 증분해에 더하는 과정에서, 스칼라 값 $\eta$ 를 도입하여 정확도를 향상시키는데 있다. 이러한 경우 누적 증분해는 다음과 같은 방식으로 계산된다.
$$
\Delta \mathbf {u} _ {i + 1} = \Delta \mathbf {u} _ {i} + \eta \delta \mathbf {u} _ {i + 1} \tag {5.5.5}
$$
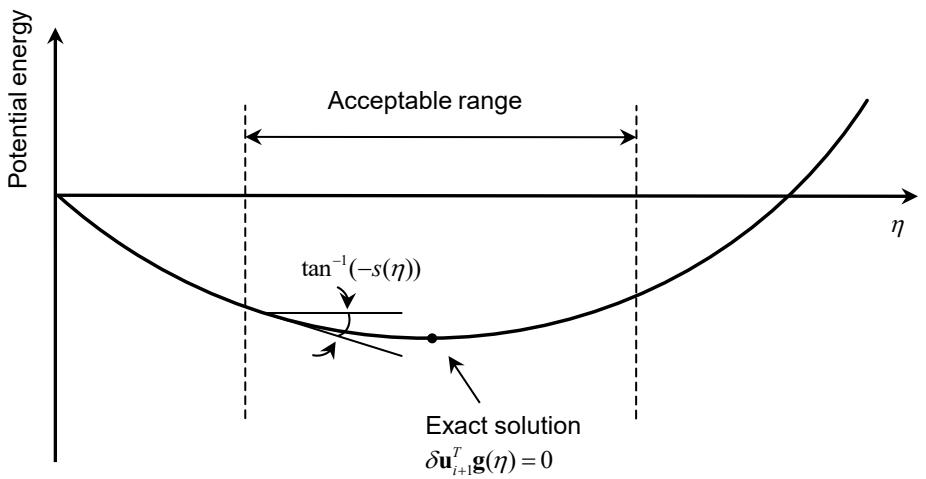
위 식에서 계산된 $\Delta u_{i+1}$ 가 평형상태를 만족한다고 가정했을 경우, 평형상태에서 총 포텐셜 에너지가 고정된다는 원리(principal of stationary total potential energy)을 이용하면, 선탐색 문제는 총 포텐셜 에너지의 $\eta$ 에 대한 미분값이 0이 되는 $\eta$ 를 찾는 문제로 귀결된다.
$$
s (\eta) = \delta \mathbf {u} _ {i + 1} ^ {T} \mathbf {g} (\eta) = 0 \tag {5.5.6}
$$
text_image
Potential energy
Acceptable range
tan⁻¹(−s(η))
Exact solution
δuᵢ₊₁ᵀg(η) = 0
그림 5.5.2 선탐색 알고리즘의 개념도
에너지의 미분값 $s(\eta)$ 가 $\eta$ 에 대해 선형으로 변한다고 가정했을 때, (5.5.6)을 만족하는 $\eta$ 는 다음과 같이 계산된다.
$$
\eta_ {2} = \frac {- s (\eta = 0)}{s (\eta = 1) - s (\eta = 0)} \tag {5.5.7}
$$
여기서 η 가 0인 경우와 1인 경우의 기울기는 다음과 같이 나타낼 수 있다.
$$
s (\eta = 0) = \delta \mathbf {u} _ {i + 1} ^ {T} \mathbf {g} _ {i} \tag {5.5.8}
$$
$$
s (\eta = 1) = \delta \mathbf {u} _ {i + 1} ^ {T} \mathbf {g} _ {i + 1}
$$
실제로 선탐색 알고리즘을 위해 가정한 것들이 정확히 만족되지 않기 때문에, (5.5.7)에 의해 계산된 $s(\eta)$ 는 일반적으로 0이 아니다. midas NFX에서는 $s(\eta_{j}) / s(\eta = 0)$ 값이 사용자가 지정한 일정 값 미만으로 계산될 때까지 반복적으로 위에서 설명된 절차가 적용된다.