| Analysis type | Integral | Matrix evaluation |
| In all analyses | $\int_{0_V}^{0} \rho^{t+\Delta t} \ddot{u}_i \delta u_i d^0 V$ $^{t+\Delta t} \mathcal{R} = \int_{0_{S_f}}^{t+\Delta t} f_i^S \delta u_i^S d^0 S$ $+ \int_{0_V}^{t+\Delta t} f_i^B \delta u_i d^0 V$ | $\mathbf{M}^{t+\Delta t} \hat{\mathbf{u}} = \left( \int_{0_V}^{0} \rho \mathbf{H}^T \mathbf{H} d^0 V \right)^{t+\Delta t} \hat{\mathbf{u}}$ $^{t+\Delta t} \mathbf{R} = \int_{0_{S_f}} \mathbf{H}^{S^T}^{t+\Delta t} \mathbf{f}^S d^0 S$ $+ \int_{0_V} \mathbf{H}^{T}^{t+\Delta t} \mathbf{f}^B d^0 V$ |
| Materially-nonlinear-only | $\int_V C_{ijrs} e_{rs} \delta e_{ij} dV$ $\int_V ^t \sigma_{ij} \delta e_{ij} dV$ | $^t \mathbf{K} \hat{\mathbf{u}} = \left( \int_V \mathbf{B}^T \mathbf{C} \mathbf{B}_L dV \right) \hat{\mathbf{u}}$ $^t \mathbf{F} = \int_V \mathbf{B}^T ^t \hat{\mathbf{\Sigma}} dV$ |
| Total Lagrangian formulation | $\int_{0_V}^{0} C_{ijrs} e_{rs} \delta_0 e_{ij} d^0 V$ $\int_{0_V}^{0} S_{ij} \delta_0 \eta_{ij} d^0 V$ $\int_{0_V}^{0} S_{ij} \delta_0 e_{ij} d^0 V$ | $^0 \mathbf{K}_L \hat{\mathbf{u}} = \left( \int_{0_V} ^0 \mathbf{B}^T _0 \mathbf{C} ^0 \mathbf{B}_L d^0 V \right) \hat{\mathbf{u}}$ $^0 \mathbf{K}_{NL} \hat{\mathbf{u}} = \left( \int_{0_V} ^0 \mathbf{B}^T _NL ^0 \mathbf{S} ^0 \mathbf{B}_{NL} d^0 V \right) \hat{\mathbf{u}}$ $^0 \mathbf{F} = \int_{0_V} ^0 \mathbf{B}^T _0 \hat{\mathbf{S}} d^0 V$ |
| Updated Lagrangian formulation | $\int_{t_V} ^t C_{ijrs} e_{rs} \delta_t e_{ij} d^t V$ $\int_{t_V} ^t \tau_{ij} \delta_t \eta_{ij} d^t V$ $\int_{t_V} ^t \tau_{ij} \delta_t e_{ij} d^t V$ | $^t \mathbf{K}_L \hat{\mathbf{u}} \left( \int_{t_V} ^t \mathbf{B}^T _t \mathbf{C} ^t \mathbf{B}_L d^t V \right) \hat{\mathbf{u}}$ $^t \mathbf{K}_{NL} \hat{\mathbf{u}} = \left( \int_{t_V} ^t \mathbf{B}^T _NL ^t \tau ^t \mathbf{B}_{NL} d^t V \right) \hat{\mathbf{u}}$ $^t \mathbf{F} = \int_{t_V} ^t \mathbf{B}^T _t ^t \hat{\mathbf{r}} d^t V$ |
These matrices depend on the specific element considered. The displacement interpolation matrices are simply assembled as in linear analysis from the displacement interpolation functions. In the following sections we discuss the calculation of the strain-displacement and stress matrices and vectors pertaining to the continuum elements that we considered earlier for linear analysis in Chapter 5. The discussion is abbreviated because the basic numerical procedures employed in the calculation of the nonlinear finite matrices are those that we have already covered. For example, we consider again variable-number-nodes elements whose interpolation functions were previously given. As before, the displacement interpolations and strain-displacement matrices are expressed in terms of the isoparametric coordinates. Thus, the integrations indicated in Table 6.4 are performed as explained in Section 5.5.
In the following discussion we consider only the UL and TL formulations because the matrices of the materially-nonlinear-only analysis can be directly obtained from these formulations, and we are only concerned with the required kinematic expressions. The evaluation of the stresses and stress-strain matrices of the elements depends on the material model used. These considerations are discussed in Section 6.6.
# 6.3.3 Truss and Cable Elements
As discussed previously in Section 4.2.3, a truss element is a structural member capable of transmitting stresses only in the direction normal to the cross section. It is assumed that this normal stress is constant over the cross-sectional area.
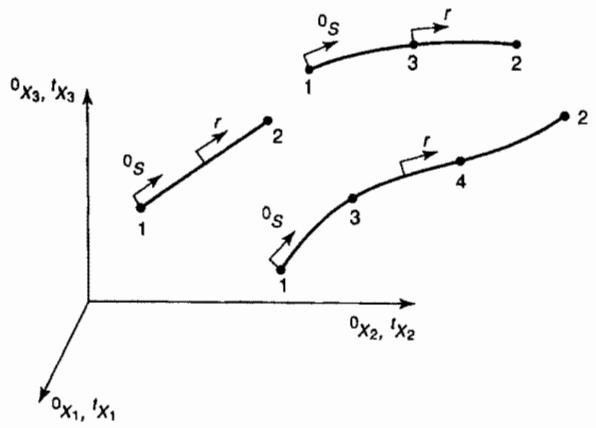
In the following we consider a truss element that has an arbitrary orientation in space. The element is described by two to four nodes, as shown in Fig. 6.3, and is subjected to large displacements and large strains. The global coordinates of the nodal points of the element are at time 0, $^0 x_1^k$ , $^0 x_2^k$ , $^0 x_3^k$ and at time $t$ , $'x_1^k$ , $'x_2^k$ , $'x_3^k$ , where $k = 1, \ldots, N$ , with $N$ equal to the number of nodes ( $2 \leq N \leq 4$ ). These nodal point coordinates are assumed to determine the spatial configuration of the truss at time 0 and time $t$ using
$$
{ } ^ { 0 } x _ { 1 } ( r ) = \sum _ { k = 1 } ^ { N } h _ { k } { } ^ { 0 } x _ { 1 } ^ { k } ; \quad { } ^ { 0 } x _ { 2 } ( r ) = \sum _ { k = 1 } ^ { N } h _ { k } { } ^ { 0 } x _ { 2 } ^ { k } ; \quad { } ^ { 0 } x _ { 3 } ( r ) = \sum _ { k = 1 } ^ { N } h _ { k } { } ^ { 0 } x _ { 3 } ^ { k } \tag {6.106}
$$
and $^{t}x_{1}(r) = \sum_{k=1}^{N} h_{k} ^{t} x_{1}^{k};$ $^{t}x_{2}(r) = \sum_{k=1}^{N} h_{k} ^{t} x_{2}^{k};$ $^{t}x_{3}(r) = \sum_{k=1}^{N} h_{k} ^{t} x_{3}^{k}$ (6.107)
where the interpolation functions $h_k(r)$ have been defined in Fig. 5.3. Using (6.106) and (6.107), it follows that
$$
{ } ^ { t } u _ { i } ( r ) = \sum _ { k = 1 } ^ { N } h _ { k } { } ^ { t } u _ { i } ^ { k } \tag {6.108}
$$
and $u_{i}(r) = \sum_{k = 1}^{N}h_{k}u_{i}^{k},\qquad i = 1,2,3$ (6.109)