| | i=5 | i=6 | i=7 | i=8 | i=9 |
| h1= | $\frac{1}{4}(1+r)(1+s)$ | $-\frac{1}{2}h_{5}$ | | | $-\frac{1}{2}h_{8}$ | $-\frac{1}{4}h_{9}$ |
| h2= | $\frac{1}{4}(1-r)(1+s)$ | $-\frac{1}{2}h_{5}$ | $-\frac{1}{2}h_{6}$ | | | $-\frac{1}{4}h_{9}$ |
| h3= | $\frac{1}{4}(1-r)(1-s)$ | | $-\frac{1}{2}h_{6}$ | $-\frac{1}{2}h_{7}$ | | $-\frac{1}{4}h_{9}$ |
| h4= | $\frac{1}{4}(1+r)(1-s)$ | | | $-\frac{1}{2}h_{7}$ | $-\frac{1}{2}h_{8}$ | $-\frac{1}{4}h_{9}$ |
| h5= | $\frac{1}{2}(1-r^{2})(1+s)$ | | | | | $-\frac{1}{2}h_{9}$ |
| h6= | $\frac{1}{2}(1-s^{2})(1-r)$ | | | | | $-\frac{1}{2}h_{9}$ |
| h7= | $\frac{1}{2}(1-r^{2})(1-s)$ | | | | | $-\frac{1}{2}h_{9}$ |
| h8= | $\frac{1}{2}(1-s^{2})(1+r)$ | | | | | $-\frac{1}{2}h_{9}$ |
| h9= | $(1-r^{2})(1-s^{2})$ | | | | | |
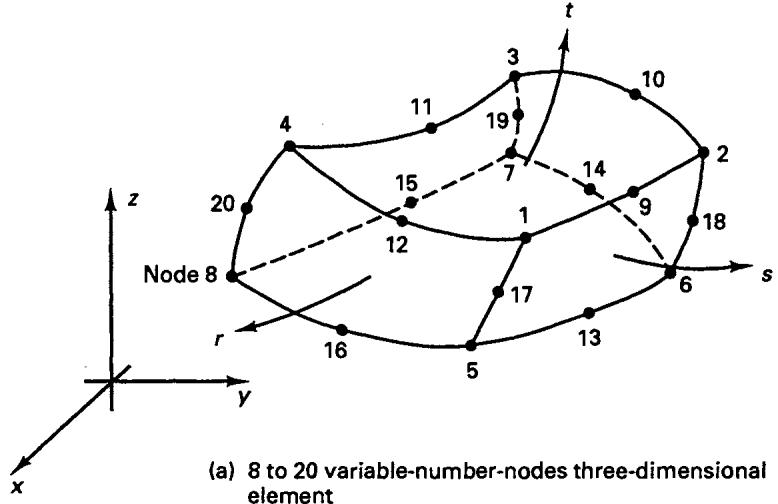
(b) Interpolation functions
Figure 5.4 Interpolation functions of four to nine variable-number-nodes two-dimensional element