| STF3 15 | Rewind the file on which the stiffness matrix of each element will be stored. |
| STF3 16 | Loop over each element. |
| STF3 17 | Identify the material property of each element. |
| STF3 18 | Set YOUNG equal to the material elastic modulus. |
| STF3 19 | Set XAREA equal to the cross-sectional area. |
| STF3 20 | Set HARDS equal to the strain hardening parameter, $H'$ . |
| STF3 21–22 | Identify the node numbers of the element. |
| STF3 23 | Calculate the element length. |
| STF3 24 | Compute the multiplying term in (2.38) as FMULT. |
| STF3 25 | Check if the element has yielded. If yes, compute FMULT as the multiplying term in (2.43). |
| STF3 26–29 | Compute the components of the stiffness matrix. |
| STF3 30 | Write the element stiffness matrix on to disc file. |
| STF3 31 | Termination of DO LOOP over each element. |
# 3.12.2 Residual force subroutine, REFOR3
The purpose of this subroutine is to calculate the equivalent nodal forces from which the residual nodal forces will be evaluated in subroutine CONUND. In view of the essentially incremental nature of the equations of plasticity, the subroutine is somewhat more intricate than the residual force
subroutines developed to date. All stress and strain components must be accumulated from the values obtained during each iteration. The situation is further complicated by the fact that an element may yield when the residual forces are applied as loads for any iteration. The precise load at which yielding begins will generally lie somewhere between the total load corresponding to the previous iteration and the total load for the present cycle. Consequently the yield load must be determined and the plastic strain computed for only the post yield portion of the load. The general procedure adopted is to determine the stress in each element so that the yield criterion is satisfied. If the actual stress in any element is greater than this permissible value, then the additional part is removed but is included in the residual force vector to maintain equilibrium.
Consider the situation existing for the $r^{th}$ iteration of any particular load increment. The solution algorithm employed is presented below.
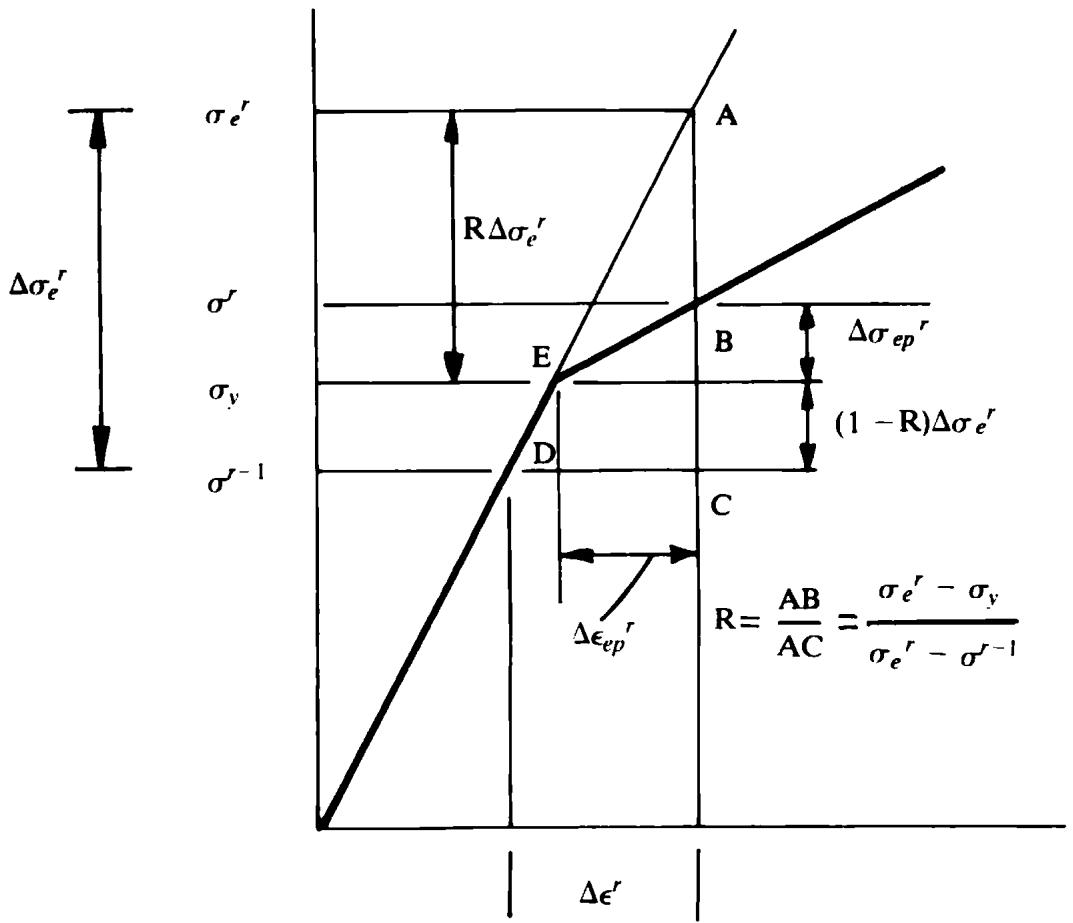
Step a The applied loads for the $r^{th}$ iteration are the residual forces $\psi^{r-1}$ calculated at the end of the $(r-1)^{th}$ iteration according to (2.4). These applied loads give rise to displacement increments, $\Delta\varphi^{r}$ , according to (2.12). Hence calculate the corresponding increment of strain $\Delta\epsilon^{r}$ . For the general element denote this value by $\Delta\epsilon^{r}$ and it is shown in Fig. 3.7.
Step b Compute the incremental stress change assuming linear elastic behaviour. This will introduce errors if the element has yielded and the material is behaving elasto-plastically. However, we will correct any discrepancy when the residual forces are calculated. Therefore we calculate the stress change according to $\Delta\sigma_{e}^{r}=E\Delta\epsilon^{r}$ , where the subscript e is used to denote that this stress is based on elastic behaviour.
Step c Accumulate the total stress for each element as $\sigma_{e}^{r} = \sigma^{r-1} + \Delta\sigma_{e}^{r}$ . The stress $\sigma^{r-1}$ will have been determined to satisfy the yield condition during the $(r-1)^{\text{th}}$ iteration. Consequently, the error in the stress $\sigma_{e}^{r}$ is limited to $\Delta\sigma_{e}^{r}$ . Again the subscript e denotes that $\sigma_{e}^{r}$ is based on an elastic behaviour.
Step d The next step in the process depends on whether or not the element had previously yielded on the $(r-1)^{\text{th}}$ iteration. This can be checked from the known value of the yield stress for the $(r-1)^{\text{th}}$ iteration. The stress limit for this cycle is given from Fig. 2.9 as
$$
\sigma_ {Y} ^ {r - 1} = \sigma_ {Y} + H ^ {\prime} \epsilon_ {p} ^ {r - 1}.
$$
Since the plastic strain $\epsilon_{p}$ will differ from element to element, each element will generally have a different permissible stress level.