$$
\mathbf {E} = \left[ \begin{array}{l l l} \varepsilon_ {x x} & \varepsilon_ {x y} & \varepsilon_ {x z} \\ \varepsilon_ {y x} & \varepsilon_ {y y} & \varepsilon_ {y z} \\ \varepsilon_ {z x} & \varepsilon_ {z y} & \varepsilon_ {z z} \end{array} \right] \tag {2.4.4}
$$
고유벡터(eigenvector)는 아래와 같은 회전 행렬(rotation matrix) R 에 저장된다.
$$
\mathbf {R} = \left[ \begin{array}{l l l} \mathbf {n} & \mathbf {s} & \mathbf {t} \end{array} \right] = \left[ \begin{array}{l l l} c _ {x n} & c _ {x s} & c _ {x t} \\ c _ {y n} & c _ {y s} & c _ {y t} \\ c _ {z n} & c _ {z s} & c _ {z t} \end{array} \right] \tag {2.4.5}
$$
여기서 $c_{xn} = \cos\phi_{ij}$ 로서 i 축과 j 축 사이의 코사인을 의미한다. 그리고 적절한 연산과정을 통해 다음과 같은 일반 3-D기준의 변환 행렬 T 를 얻게 된다.
$$
\mathbf {T} = \left[ \begin{array}{c c c c c c} c _ {x n} ^ {2} & c _ {y n} ^ {2} & c _ {z n} ^ {2} & c _ {x n} c _ {y n} & c _ {y n} c _ {z n} & c _ {z n} c _ {x n} \\ c _ {x s} ^ {2} & c _ {y s} ^ {2} & c _ {z s} ^ {2} & c _ {x s} c _ {y s} & c _ {y s} c _ {z s} & c _ {z s} c _ {x s} \\ c _ {x t} ^ {2} & c _ {y t} ^ {2} & c _ {z t} ^ {2} & c _ {x t} c _ {y t} & c _ {y t} c _ {z t} & c _ {z t} c _ {x t} \\ 2 c _ {x n} c _ {x s} & 2 c _ {y n} c _ {y s} & 2 c _ {z n} c _ {z s} & c _ {x n} c _ {y s} + c _ {y n} c _ {x s} & c _ {y n} c _ {z s} + c _ {z n} c _ {y s} & c _ {z n} c _ {x s} + c _ {x n} c _ {z s} \\ 2 c _ {x s} c _ {x t} & 2 c _ {y s} c _ {y t} & 2 c _ {z s} c _ {z t} & c _ {x s} c _ {y t} + c _ {y s} c _ {x t} & c _ {y s} c _ {z t} + c _ {z s} c _ {y t} & c _ {z s} c _ {x t} + c _ {x s} c _ {z t} \\ 2 c _ {x t} c _ {x n} & 2 c _ {y t} c _ {y n} & 2 c _ {z t} c _ {z n} & c _ {x t} c _ {y n} + c _ {y t} c _ {x n} & c _ {y t} c _ {z n} + c _ {z t} c _ {y n} & c _ {z t} c _ {x n} + c _ {x t} c _ {z n} \end{array} \right] \tag {2.4.6}
$$
구성 모델은 균열 좌표계를 기준으로 구성되며 다음과 같이 표현된다.
$$
\sigma_ {n s t} ^ {t + \Delta t} = \sigma \left(_ {i + 1} ^ {t + \Delta t} \varepsilon_ {n s t}\right) \tag {2.4.7}
$$
최종적으로 균열 좌표계 기준의 응력벡터는 요소 좌표계 기준으로 변환, 갱신된다.
$$
\mathbf {\Sigma} _ {i + 1} ^ {t + \Delta t} \sigma_ {x y z} = \mathbf {T} _ {i + 1} ^ {T} \mathbf {\Sigma} _ {n s t} ^ {t + \Delta t} \sigma_ {n s t} \tag {2.4.8}
$$
회전균열모델에서는 변환 행렬 T 가 현재 변형률에 의해 $\mathbf{T}^{T}\left(\begin{array}{c}t+\Delta t\\ i+1\end{array}\varepsilon_{xyz}\right)$ 와 같이 결정된다. 한편 고정균열모델에서는 초기 균열(incipient cracking)에 의해 정의된 변환 행렬을 그대로 준용한다.
# 2-5 강성 행렬
콘크리트 균열해석은 비선형 해석이므로 반복 해법을 사용한다. 증분 반복 해법을통한 해석에서 외력 벡터와 내력 벡터의 평형은 뉴튼 랩슨(Newton-Raphson)법과같은 방식을 통해 찾게 된다. 이때 평형 조건을 만족하기 위해 구성 모델을 적절한강성 행렬로 정의해야 한다.
midas FEA에서는 강성 행렬을 구하기 위하여 할선강성(secant stiffness) 기법과접선강성(tangent stiffness) 기법을 사용한다. 할선강성 기법은 균열이 광범위하게발생하는 철근 콘크리트 구조물의 해석에 특히 탁월하고 안정적인 해를 구하는 것으로 알려져 있다. 접선강성 기법은 국부적인 균열이나 균열 전파(crackpropagation)와 같은 해석에 탁월한 것으로 알려져 있다.
# 2.5.1 접선강성 행렬
요소 좌표계에서 접선강성행렬은 다음과 같다.
$$
\mathbf {D} = \mathbf {T} ^ {T} \mathbf {D} _ {\text { tangent }} \mathbf {T} \tag {2.5.1}
$$
여기서, T 는 변형률 변환행렬을 의미하고, $\mathbf { D } _ { \mathrm { t a n g e n t } }$ 는 균열 좌표계 기준 접선강성행렬을 의미한다.
접선강성행렬은 다음과 같이 네 개의 부분 행렬로 분할할 수 있다.
$$
\mathbf {D} _ {\text {tangent}} = \left[ \begin{array}{l l} \mathbf {D} _ {\mathrm{nn}} & \mathbf {D} _ {\mathrm{n} \theta} \\ \mathbf {D} _ {\theta \mathrm{n}} & \mathbf {D} _ {\theta \theta} \end{array} \right] \tag {2.5.2}
$$
여기서 $\mathsf { D } _ { \mathsf { n } \mathsf { n } } \mathsf { \stackrel { \circ } { = } }$ 접선강성성분 중 국부균열 변형률의 수직 성분을 나타내는 부분행렬이다. $\sf D _ { \sf \theta \Theta } \equiv$ 접선강성성분 중 국부균열 변형률의 전단 성분을 의미한다. $\mathsf { D } _ { \mathsf { n } \theta } .$ 와 $\mathsf { D } _ { \mathsf { { \theta } n } }$ 는 접선 강성성분 중 수직과 전단 변형률 간의 커플링 관계를 나타내는 부분 행렬이다.
여러 연구자들 $^{3}$ 에 의하면 $D_{\theta\theta}$ 가 주응력 성분에만 영향을 받으며 커플링 부분 행렬은 없다고 본다. 따라서 다음과 같이 나타낼 수 있다.
$$
\mathbf {D} _ {\theta \theta} = \left[ \begin{array}{c c c} \frac {\sigma_ {1} - \sigma_ {2}}{2 \left(\varepsilon_ {1} - \varepsilon_ {2}\right)} & 0 & 0 \\ 0 & \frac {\sigma_ {2} - \sigma_ {3}}{2 \left(\varepsilon_ {2} - \varepsilon_ {3}\right)} & 0 \\ 0 & 0 & \frac {\sigma_ {3} - \sigma_ {1}}{2 \left(\varepsilon_ {3} - \varepsilon_ {1}\right)} \end{array} \right] \tag {2.5.3}
$$
위의 관계식에서 알 수 있듯이 전단강성은 주응력들의 영향을 받는 것을 알 수 있다. 이것은 주방향 좌표계의 회전에 의한 직접적 결과이다.
한편 고정균열모델에서는 커플링 부분행렬이 0 이 아닐 수가 있으며, 전단 지연 (shear-retention)과 수직 변형률 성분간의 관계에 의해 결정된다. 일반적으로 전단 성분이 수직 응력 성분에 미치는 영향은 없다고 보기 때문에 $D_{n\theta}$ 은 0 이 된다. 반면에 $D_{n\theta}$ 은 다음과 같이 주어진다.
$$
\mathbf {D} _ {\theta \mathrm{n}} = \left[ \begin{array}{c c c} \frac {\partial \sigma_ {n s}}{\partial \varepsilon_ {n n}} & \frac {\partial \sigma_ {n s}}{\partial \varepsilon_ {s s}} & \frac {\partial \sigma_ {n s}}{\partial \varepsilon_ {t t}} \\ \frac {\partial \sigma_ {s t}}{\partial \varepsilon_ {n n}} & \frac {\partial \sigma_ {s t}}{\partial \varepsilon_ {s s}} & \frac {\partial \sigma_ {s t}}{\partial \varepsilon_ {t t}} \\ \frac {\partial \sigma_ {t n}}{\partial \varepsilon_ {n n}} & \frac {\partial \sigma_ {t n}}{\partial \varepsilon_ {s s}} & \frac {\partial \sigma_ {t n}}{\partial \varepsilon_ {t t}} \end{array} \right] \tag {2.5.4}
$$
3 Crisfield, M. A., and Wills, J., “Analysis of R/C panels using different concrete models”, J. Eng. Mech. Div., ASCE 115, 3 (1989), 578–597.
Feenstra, P. H., “Computational Aspects of Biaxial Stress in Plain and Reinforced Concrete”, PhD thesis, Delft University of Technology, 1993.
Rots, J. G., “Computational Modeling of Concrete Fracture”, PhD thesis, Delft University of Technology, 1988.
Willam, K. J., Pramono, E., and Sture, S., “Fundamental issues of smeared crack models”, In Proc. SEM/RILEM Int. Conf. on Fracture of Concrete and Rock, Houston 1987 (New York, 1989), S. P. Shah and S. E. Schwartz, Eds., Springer-Verlag, pp. 142–157.
위 행렬은 전단 지연이 수직 균열 변형률에 독립적인 경우에는 0 이 된다.
한편 접선강성행렬의 전단 항들은 다음과 같이 나타낼 수 있다.
$$
\mathbf {D} _ {0 0} = \left[ \begin{array}{c c c} \frac {\partial \sigma_ {n s}}{\partial \gamma_ {n s}} & 0 & 0 \\ 0 & \frac {\partial \sigma_ {s t}}{\partial \gamma_ {s t}} & 0 \\ 0 & 0 & \frac {\partial \sigma_ {t n}}{\partial \gamma_ {t n}} \end{array} \right] \tag {2.5.5}
$$
수직 강성 항들을 의미하는 $D_{nn}$ 성분은 다음과 같이 편미분 항들로 구성 된다. $D_{nn}$ 은 횡방향 변형률에 의한 상호 영향이 주 응력의 연산에 반영되기 때문에, 다음과 같이 비대각항들이 0이 아니며 비대칭 행렬이 된다.
$$
\mathbf {D} _ {\mathrm{nn}} = \left[ \begin{array}{c c c} \frac {\partial \sigma_ {n n}}{\partial \varepsilon_ {n n}} & \frac {\partial \sigma_ {n n}}{\partial \varepsilon_ {s s}} & \frac {\partial \sigma_ {n n}}{\partial \varepsilon_ {t t}} \\ \frac {\partial \sigma_ {s s}}{\partial \varepsilon_ {n n}} & \frac {\partial \sigma_ {s s}}{\partial \varepsilon_ {s s}} & \frac {\partial \sigma_ {s s}}{\partial \varepsilon_ {t t}} \\ \frac {\partial \sigma_ {t t}}{\partial \varepsilon_ {n n}} & \frac {\partial \sigma_ {t t}}{\partial \varepsilon_ {s s}} & \frac {\partial \sigma_ {t t}}{\partial \varepsilon_ {t t}} \end{array} \right] \tag {2.5.6}
$$
편미분을 통해 강성 행렬을 유도하기 위하여 먼저 응력-변형률 관계를 다시 적어 보면 다음과 같다.
$$
\sigma_ {i} = f _ {i} (\boldsymbol {\alpha}, \boldsymbol {\varepsilon} _ {n s t}) \cdot \boldsymbol {g} _ {i} (\boldsymbol {\alpha}, \boldsymbol {\varepsilon} _ {n s t}) \tag {2.5.7}
$$
주변형률 벡터 $\varepsilon_{nst}$ 에 대해 편미분을 취하면,
$$
\begin{array}{l} \frac {\partial \sigma_ {i}}{\partial \boldsymbol {\varepsilon} _ {n s t}} = \boldsymbol {g} _ {i} (\boldsymbol {\alpha}, \boldsymbol {\varepsilon} _ {n s t}) \left\{\frac {\partial \boldsymbol {\alpha} ^ {\mathrm{T}}}{\partial \boldsymbol {\varepsilon} _ {n s t}} \frac {\partial f _ {i}}{\partial \boldsymbol {\alpha}} + \frac {\partial f _ {i}}{\partial \boldsymbol {\varepsilon} _ {n s t}} \right\} + f _ {i} (\boldsymbol {\alpha}, \boldsymbol {\varepsilon} _ {n s t}) \left\{\frac {\partial \boldsymbol {\alpha} ^ {\mathrm{T}}}{\partial \boldsymbol {\varepsilon} _ {n s t}} \frac {\partial \boldsymbol {g} _ {i}}{\partial \boldsymbol {\alpha}} + \frac {\partial \boldsymbol {g} _ {i}}{\partial \boldsymbol {\varepsilon} _ {n s t}} \right\} \\ = \mathbf {g} _ {i} (\boldsymbol {\alpha}, \boldsymbol {\varepsilon} _ {n s t}) \left\{\mathbf {W} ^ {\mathrm{T}} \frac {\partial f _ {i}}{\partial \boldsymbol {\alpha}} + \frac {\partial f _ {i}}{\partial \boldsymbol {\varepsilon} _ {n s t}} \right\} + f _ {i} (\boldsymbol {\alpha}, \boldsymbol {\varepsilon} _ {n s t}) \left\{\mathbf {W} ^ {\mathrm{T}} \frac {\partial g _ {i}}{\partial \boldsymbol {\alpha}} + \frac {\partial g _ {i}}{\partial \boldsymbol {\varepsilon} _ {n s t}} \right\} \tag {2.5.8} \\ \end{array}
$$
여기서, $W = \frac{\partial \alpha^{T}}{\partial \varepsilon_{nst}}$
위의 식을 정리하면 다음과 같다.
$$
\mathbf {D} _ {n s t} = \left[ \begin{array}{c c c} \left\{m _ {1} r _ {1} + \left(1 - m _ {1}\right) r _ {4} \right\} \overline {{E _ {1}}} & 0 & 0 \\ 0 & \left\{m _ {2} r _ {2} + \left(1 - m _ {2}\right) r _ {5} \right\} \overline {{E _ {2}}} & 0 \\ 0 & 0 & \left\{m _ {3} r _ {3} + \left(1 - m _ {3}\right) r _ {6} \right\} \overline {{E _ {3}}} \end{array} \right]
$$
$$
+ \left[ \begin{array}{c c c} g _ {1} & 0 & 0 \\ 0 & g _ {2} & 0 \\ 0 & 0 & g _ {3} \end{array} \right] \left[ \begin{array}{c c c} \frac {\partial f _ {1}}{\partial \varepsilon_ {1}} & \frac {\partial f _ {1}}{\partial \varepsilon_ {2}} & \frac {\partial f _ {1}}{\partial \varepsilon_ {3}} \\ \frac {\partial f _ {2}}{\partial \varepsilon_ {1}} & \frac {\partial f _ {2}}{\partial \varepsilon_ {2}} & \frac {\partial f _ {2}}{\partial \varepsilon_ {3}} \\ \frac {\partial f _ {3}}{\partial \varepsilon_ {1}} & \frac {\partial f _ {3}}{\partial \varepsilon_ {2}} & \frac {\partial f _ {3}}{\partial \varepsilon_ {3}} \end{array} \right]
$$
$$
+ \left[ \begin{array}{c c c} g _ {1} & 0 & 0 \\ 0 & g _ {2} & 0 \\ 0 & 0 & g _ {3} \end{array} \right] \left[ \begin{array}{c c c c} \frac {\partial f _ {1}}{\partial \alpha_ {1}} & \frac {\partial f _ {1}}{\partial \alpha_ {2}} & \dots & \frac {\partial f _ {1}}{\partial \alpha_ {6}} \\ \frac {\partial f _ {2}}{\partial \alpha_ {1}} & \frac {\partial f _ {2}}{\partial \alpha_ {2}} & \dots & \frac {\partial f _ {2}}{\partial \alpha_ {6}} \\ \frac {\partial f _ {3}}{\partial \alpha_ {1}} & \frac {\partial f _ {3}}{\partial \alpha_ {2}} & \dots & \frac {\partial f _ {3}}{\partial \alpha_ {6}} \end{array} \right] \left[ \begin{array}{c c c} 1 - r _ {1} & 0 & 0 \\ 0 & 1 - r _ {2} & 0 \\ 0 & 0 & 1 - r _ {3} \\ 1 - r _ {4} & 0 & 0 \\ 0 & 1 - r _ {5} & 0 \\ 0 & 0 & 1 - r _ {6} \end{array} \right]
$$
(2.5.9)
여기서 상태 표시를 의미하는 $m_{i}$ 가 추가되었는데, 이는 변형률의 상태에 따라 다음과 같은 값을 갖는다.
$$
m _ {i} = \left\{ \begin{array}{l l} 1 & \text { if } \quad \varepsilon_ {i} > 0 \\ 0 & \text { if } \quad \varepsilon_ {i} < 0 \end{array} \right. \tag {2.5.10}
$$
또한 인장과 압축 영역 각각에 대해 할선강선항은 다음과 같이 정의 된다.
$$
\overline {{{E}}} _ {j} = \frac {f _ {j} (\boldsymbol {\alpha} , \boldsymbol {\varepsilon} _ {n s t})}{\alpha_ {j}} \quad , \quad \overline {{{E}}} _ {j} = \frac {f _ {j} (\boldsymbol {\alpha} , \boldsymbol {\varepsilon} _ {n s t})}{\alpha_ {j + n s t r}} \tag {2.5.11}
$$
접선강성 항들은 전향차분(forward-difference) 기법을 통해 계산된다. 즉 j 번째 성분은 미소한 값 h을 사용하여 다음과 같이 나타낼 수 있다.
$$
\begin{array}{l} \frac {\partial f _ {i}}{\partial \varepsilon_ {j}} = \frac {f _ {i} \left(\boldsymbol {\alpha} , \boldsymbol {\varepsilon} _ {n s t} + h \boldsymbol {\varepsilon} _ {j}\right) - f _ {i} \left(\boldsymbol {\alpha} , \boldsymbol {\varepsilon} _ {n s t}\right)}{h} \tag {2.5.12} \\ \frac {\partial f _ {i}}{\partial \alpha_ {j}} = \frac {f _ {i} (\mathbf {a} + h \mathbf {a} _ {j} , \boldsymbol {\varepsilon} _ {n s t}) - f _ {i} (\mathbf {a} , \boldsymbol {\varepsilon} _ {n s t})}{h} \\ \end{array}
$$
여기서 벡터 $a_{j}$ , $e_{j}$ 는 j번째 항을 제외하고는 모두 0이다.
강성 행렬 $D_{nst}$ 의 대각 항들은 다음과 같이 명료하게 표현할 수 있다.
$$
\begin{array}{l} \frac {\partial \sigma_ {i}}{\partial \varepsilon_ {i}} \\ = \left\{m _ {i} r _ {i} + (1 - m _ {i}) r _ {i + n s t r} \right\} \overline {{E _ {i}}} + g _ {i} \left\{(1 - r _ {i}) \frac {\partial f _ {i}}{\partial \alpha_ {i}} + (1 - r _ {i + n s t r}) \frac {\partial f _ {i}}{\partial \alpha_ {i + n s t r}} \right\} \end{array} \tag {2.5.13}
$$
인장 상태, 즉 $m_{i}=1$ 그리고 $r_{i+nsrt}=1$ 인 경우에 강성 항은 다음과 같이 축약된다.
$$
\frac {\partial \sigma_ {i}}{\partial \varepsilon_ {i}} = r _ {i} \overline {{{E _ {i}}}} + g _ {i} (1 - r _ {i}) \frac {\partial f _ {i}}{\partial \alpha_ {i}} \tag {2.5.14}
$$
$$
\frac {\partial \sigma_ {i}}{\partial \varepsilon_ {i}} = \left\{ \begin{array}{l l} \overline {{E _ {i}}} & \text { if unloading, } \left(r _ {i} = 1, g _ {i} \leq 1\right) \\ \frac {\partial f _ {i}}{\partial \alpha_ {i}} & \text { if loading, } \left(r _ {i} = 0, g _ {i} = 1\right) \end{array} \right. \tag {2.5.15}
$$
압축 상태, 즉 $m_{i}=1$ 그리고 $r_{i+nsrt}=1$ 인 경우에 강성 항은 다음과 같이 축약된다.
$$
\frac {\partial \sigma_ {i}}{\partial \varepsilon_ {i}} = r _ {i + n s t r} \overline {{E _ {i}}} + g _ {i} (1 - r _ {i + n s t r}) \frac {\partial f _ {i}}{\partial \alpha_ {i + n s t r}} \tag {2.5.16}
$$
$$
\frac {\partial \sigma_ {i}}{\partial \varepsilon_ {i}} = \left\{ \begin{array}{l l} \overline {{E _ {i}}} & \text { if unloading, } \left(r _ {i + n s t r} = 1, g _ {i} \leq 1\right) \\ \frac {\partial f _ {i}}{\partial \alpha_ {i + n s t r}} & \text { if loading, } \left(r _ {i + n s t r} = 0, g _ {i} = 1\right) \end{array} \right. \tag {2.5.17}
$$
# 2.5.2 할선강성 행렬
할선강성 방식은 모든 방향의 포아송비를 0으로 갖는 직교 이방성 재료 (orthotropic material)의 강성행렬을 사용한다. 따라서 강성 행렬은 주 방향 좌표계(principal coordinate system)에서 다음과 같이 표현할 수 있다.
$$
\mathbf {D} _ {\text {secant}} = \left[ \begin{array}{c c c c c c} \overline {{E}} _ {1} & 0 & 0 & 0 & 0 & 0 \\ & \overline {{E}} _ {2} & 0 & 0 & 0 & 0 \\ & & \overline {{E}} _ {3} & 0 & 0 & 0 \\ & & & \overline {{G}} _ {1 2} & 0 & 0 \\ & \text {sym.} & & & \overline {{G}} _ {2 3} & 0 \\ & & & & & \overline {{G}} _ {3 1} \end{array} \right] \tag {2.5.18}
$$
# 2-6 압축모델
# 2.6.1 전변형률 균열모델의 압축 모델
압축 응력하의 콘크리트가 횡방향 구속이 되면, 등방성 응력(isotropic stress)들이증가하고, 이로 인하여 강도(strength)와 연성(ductility)이 증가하게 된다. 이러한등방성 응력의 영향을 반영하기 위해 압축 응력-변형률 관계가 적절히 수정된다.즉, 압축 응력-변형률 함수의 인자들인 피크 응력(peak stress) fcf와 피크 변형률(peak strain) p 들은 파괴를 일으키는 압축 응력들을 나타내는 파괴 함수(failurefunction)로부터 결정된다. 이 파괴 함수는 횡방향 구속응력들의 함수이다. 압축응력의 직교방향으로 균열이 발생하면 피크 변형률과 피크 응력이 감소하게 된다.피크 변형률은 계수 $\beta _ { \mathrm { { \varepsilon c r } } }$ 를 사용하여 감소되며, 피크 응력은 계수 $\beta _ { \mathrm { o c r } }$ 을 사용하여감소되게 된다. 이들 감소계수에 대한 자세한 식은 이후 절 횡방향 영향에서 설명하고 있다.
$$
f _ {p} = \beta_ {\sigma_ {c r}} \cdot f _ {c f} \quad \alpha_ {p} = \beta_ {\varepsilon_ {c r}} \cdot \varepsilon_ {p} \tag {2.6.1}
$$
압축부의 기본 함수는 $\mathrm { f _ { p } } \underline { { \boldsymbol { \mathcal { R } } } } \mathrm { | }$ $\alpha _ { \mathrm { { p } } }$ 들로 표현되며, 기 정의된 곡선들을 활용할 수 있다.기 정의된 곡선의 종류로는 불변(constant), 선형(linear), 선형경화(linearhardening), 포화경화(saturation hardening), 다중선형(multi-linear) 곡선들이 있으며 압축부에 사용 가능한 경화-연화(hardening-softening) 곡선은 포물선(parabolic), Thorenfeldt et. al.4 의 경화 곡선들이다.
4 Thorenfeldt, E., Tomaszewicz, A., and Jensen, J. J., “Mechanical properties of high-strength concrete and applications in design”, In Proc. Symp. Utilization of High-Strength Concrete (Stavanger, Norway) (Trondheim, 1987), Tapir.
text_image
σ
ε
(a) elastic
(b) constant
(c) Thorenfeldt
text_image
σ
ε
E_har
f_t
(d) linear
line
| ε | σ |
|-------|-------|
| (ε₀, σ₀) | 0 |
| (ε₁, σ₁) | 0 |
| (ε₂, σ₂) | 0 |
| (εₙ, σₙ) | 0 |
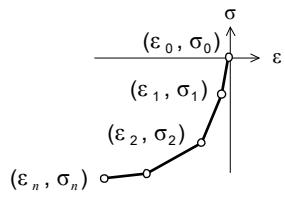
(e) mult-linear
line
| ε | σ |
| ------- | ------- |
| -1/γ | -1/γ |
| ε | σ |
| f_c0 | f_c0 |
| f_c∞ | f_c∞ |
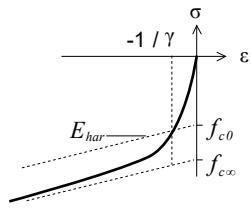
(f) saturation type
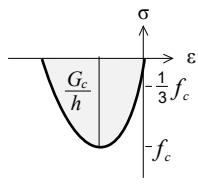
(g) parabolic
그림 2.6.1 압축 모델
# 탄성 모델
일반적인 탄성 모델은 영 계수를 사용한다. 그림 2.6.1(a).
# 불변 모델
압축강도를 초과 하면 더 이상 압축응력 증가가 없는 모델이다. 그림 2.6.1(b).
압축강도 : fc 0.0 의 값을 입력한다.
# Thorenfeldt 모델
압축강도 : fc 0.0 의 값을 입력한다. (그림 2.6.1(c)).
text_image
αp
f
α
fp
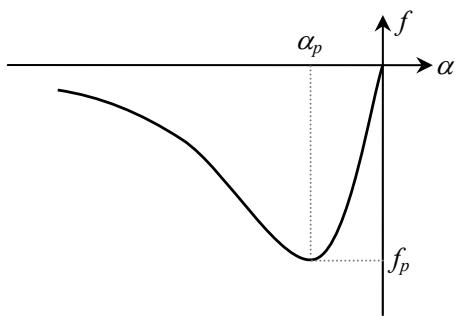
그림2.6.2 Thorenfeldt 압축곡선
Thorenfeldt 곡선 식은 다음과 같다.
$$
f = - f _ {p} \frac {\alpha_ {i}}{\alpha_ {p}} \left(\frac {n}{n - 1 + \left(\frac {\alpha_ {i}}{\alpha_ {p}}\right) ^ {n k}}\right) \tag {2.6.2}
$$
$$
\text { 에기서 } n = 0. 8 0 + \frac {f _ {c c}}{1 7}, k = \left\{ \begin{array}{l l} 1 & \text { if } 0 > \alpha > \alpha_ {p} \\ 0. 6 7 + \frac {f _ {c c}}{6 2} & \text { if } \alpha \leq \alpha_ {p} \end{array} \right.
$$
# - 선형경화 모델
1차 압축 항복 후 저감된 강성, $E_{har}$ 으로 압축거동을 계속하는 모델이다. (그림 2.6.1(d)).
$$
f _ {c} > 0. 0, E _ {h a r} > 0. 0 \text { 의 값을 입력한다. }
$$
# - 다중 선형경화 모델
사용자가 임의의 응력-변형률 값들을 입력하여 응력 곡선을 정의할 수 있다. 최대