# 3-6 수렴조건
비선형해석에서 해는 반복법을 사용하여 얻어진다. 이 때 일정한 기준을 통과하게되면 반복법을 사용하여 얻어진 해가 수렴하였다고 간주하게 된다. 이러한 수렴판단기준을 제공하기 위해서 수렴조건을 적용하게 된다. 수렴조건으로는 부재력기준(force norm), 변위 기준(displacement norm), 에너지 기준(energy norm) 등이 있으며, 이들 값이 허용값보다 작아지면 해가 수렴되었다고 판단하게 된다.
$$
\text { Force norm ratio } = \frac {\sqrt {\delta \mathbf {g} _ {i} ^ {T} \delta \mathbf {g} _ {i}}}{\sqrt {\Delta \mathbf {g} _ {i} ^ {T} \Delta \mathbf {g} _ {i}}} \tag {3.6.1}
$$
$$
\text { Displacement norm ratio } = \frac {\sqrt {\delta \mathbf {u} _ {i} ^ {T} \delta \mathbf {u} _ {i}}}{\sqrt {\Delta \mathbf {u} _ {i} ^ {T} \Delta \mathbf {u} _ {i}}} \tag {3.6.2}
$$
$$
\text { Energy norm ratio } = \left| \frac {\left(\delta \mathbf {u} _ {i} \delta \mathbf {g} _ {i}\right) \left(\delta \mathbf {u} _ {i} \delta \mathbf {g} _ {i}\right) ^ {T}}{\left(\Delta \mathbf {u} _ {i} \Delta \mathbf {g} _ {i}\right) \left(\Delta \mathbf {u} _ {i} \Delta \mathbf {g} _ {i}\right) ^ {T}} \right| \tag {3.6.3}
$$
수렴여부를 판단하기 위하여 선택하는 기준은 해석종류에 따라 다르다. 구조물이자유롭게 변형될 수 있는 구조로 되어 있는 경우 부재력 기준은 부적절할 수 있다.재료의 연화(softening)거동은 경화(hardening)거동보다 수렴조건이 더 까다롭다.어떤 모델을 해석하는 경우에도 수렴기준이 되는 수렴조건의 선택은 타당한 이유를 가지고 있어야 한다. 그리고 비선형모델에서 수렴조건을 선택하는데 어려움이있다면, 두 개의 수렴조건을 사용하여 각각의 결과를 비교해 보는 것이 좋다.
# 3-7 자동전환기능
midas FEA에서는 반복해석을 진행하는 도중 호장법으로 전환하여 계속적으로 진행시키는 자동전환(auto-switching)기능을 제공한다. 반복해석을 진행하는 과정에서 수렴성의 문제가 발생하는 경우에 자동으로 호장법으로 반복법을 바꿔주는 것은 매우 유용하다.
자동전환기능을 사용하기 위해서는 기울기 예측을 수행하여야 하며, 다음과 같은식이 사용된다.
$$
k _ {i} = \frac {\mathbf {g} _ {i} \Delta \mathbf {u} _ {i}}{\Delta \mathbf {u} _ {i} ^ {T} \Delta \mathbf {u} _ {i}} \tag {3.7.1}
$$
식 (3.7.1)에서 얻어진 $k _ { i }$ 와 초기 1k 값을 사용하여 강성매개변수 $C _ { s }$ 를 산정한다.
$$
C _ {s} = \frac {k}{k _ {1}} \tag {3.7.2}
$$
한 하중 구간 동안의 $C _ { s }$ 의 변화량을 $\Delta C _ { s }$ 라고 할 때, 현재의 하중 구간에서의 변화량을 $\Delta C _ { s d }$ 라고 하고, 초기 $C _ { s }$ 변화량을 $\Delta C _ { s 1 }$ 라고 하면 현재의 변화와 초기의변화의 비를 $\Delta C _ { s d } / \Delta C _ { s 1 }$ 로 표현할 수 있다.
$\Delta C _ { s d } / \Delta C _ { s 1 }$ 값을 하중스텝에 따라 갱신하게 되면 최대값에 다가가게 되면서 $\Delta C _ { s d }$ 는 0에 근접하게 된다. $\Delta C _ { s d } / \Delta C _ { s 1 }$ 값이 사용자가 정의한 허용 오차허용범위 이내로 들어가게 되면 호장법으로 자동 전환된다.
# Analysis and Algorithm Manual
# Part 4 Linear Analysis
Chapter 1. Linear Static Analysis
Chapter 2. Modal Analysis
Chapter 3. Time History Analysis
Chapter 4. Response Spectrum Analysis
Chapter 5. Linear Buckling Analysis
# Chapter 1. Linear Static Analysis
# 1-1 개요
midas FEA의 선형정적해석(linear static analysis)에 사용된 기본방정식은 다음과같다. 구조물의 강성, 하중, 변위는 전체좌표계를 기준으로 계산되고, 절점좌표계의변위는 전체좌표계의 변위를 변환하여 구한다. 구조해석시 강성이나 경계조건의부족으로 특이성오류(singular error)가 발생할 수 있으므로 입력에 주의해야 한다.
$$
\mathbf {K} \mathbf {u} = \mathbf {p} \tag {1.1.1}
$$
여기서,
K : 구조물의 강성행렬
u : 전체좌표계의 변위벡터
p : 하중벡터
# 1-2 비선형요소의 선형정적해석
midas FEA에서는 인장 또는 압축전담 요소를 사용한 구조물의 선형정적해석은아래의 순서도와 같이 반복적인 해석으로 해를 구한다. 탄성연결요소(elastic link)의 인장 또는 압축 전담요소를 사용한 경우에는 프로그램 내부적으로 자동 반복선형해석을 수행하여 해를 얻는다. 비선형 부재의 강성은 해석 결과의 영향을 받기 때문에 반복 수렴과정을 통하여 구조물의 강성과 하중에 맞는 비선형부재의 강성을 결정해야 한다. 비선형 부재를 사용한 해석의 결과는 다른 하중조건의 결과와 선형조합을 하지 않아야 한다. 조합된 하중에 대한 결과를 구하고자 할 경우에는 하중을 조합하여 독립적으로 해석을 수행하여 결과를 얻어야 한다.
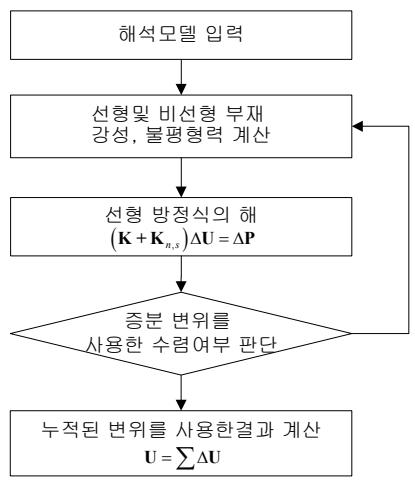
flowchart
```mermaid
graph TD
A["해석모델 입력"] --> B["선형 및 비선형 부재
강성, 불평형력 계산"]
B --> C["선형 방정식의 해
(K + Kₙ,ₛ) ΔU = ΔP"]
C --> D{증분 변위를
사용한 수렴여부 판단}
D -->|Yes| E["누적된 변위를 사용한결과 계산
U = ΣΔU"]
D -->|No| B
```
여기서,
K : 선형부재의 강성
${ \bf K } _ { n , s }$ K n s, : 비선형부재의 강성
∆U U, : 불평형력에 의한 증분변위와 누적변위
∆P : 불평형력(외력-내력)
# Chapter 2. Modal Analysis
# 2-1 개요
고유치해석은 구조물 고유의 동적 특성을 분석하는데 사용되며, 자유진동해석(free vibration analysis) 이라고도 한다. 비감쇠 자유진동(undamped free vibration) 조건하의 운동 방정식은 식 (2.1.1)과 같은 선형 2차 미분방정식이다.
$$
\mathbf {M} \ddot {\mathbf {u}} (t) + \mathbf {K} \mathbf {u} (t) = \mathbf {0} \tag {2.1.1}
$$
여기서,
K : 구조물의 강성행렬
M : 구조물의 질량행렬
변위 u 를 형상 행렬 Φ와 시간의 함수로 이루어진 벡터 $\mathbf{Y}(t)$ 의 곱( $\mathbf{u}=\mathbf{\Phi}\mathbf{Y}(t)$ )으로 표현하면 다음과 같은 식을 얻을 수 있다.
$$
\mathbf {M} \boldsymbol {\Phi} \ddot {\mathbf {Y}} + \mathbf {K} \boldsymbol {\Phi} \mathbf {Y} = \mathbf {0} \tag {2.1.2}
$$
시간의 함수 $\mathbf{Y}(t)$ 를 다음과 같이 가정한다.
$$
\mathbf {Y} (t) = \left\{y _ {1} (t) \quad \dots \quad y _ {m} (t) \quad \dots \quad y _ {n} (t) \right\} ^ {T} \tag {2.1.3}
$$
여기서,
n : 전체 자유도 개수
$$
y _ {m} (t) \quad : \cos (\omega_ {m} t + \beta_ {m})
$$
식 (2.1.3)을 (2.1.2)에 대입하면 다음과 같다.
$$
(- \mathbf {M} \boldsymbol {\Phi} \boldsymbol {\Lambda} + \mathbf {K} \boldsymbol {\Phi}) \mathbf {Y} = \mathbf {0} \tag {2.1.4}
$$
행렬 Λ와 Φ는 다음과 같이 구성된다.
$$
\boldsymbol {\Lambda} = \left[ \begin{array}{c c c c c} \lambda_ {1} & & & & \\ & \ddots & & & \\ & & \lambda_ {m} & & \\ & & & \ddots & \\ & & & & \lambda_ {n} \end{array} \right], \quad \lambda_ {m} = \omega_ {m} ^ {2} \tag {2.1.5}
$$
$$
\boldsymbol {\Phi} = \left[ \begin{array}{l l l l l} \phi_ {1} & \dots & \phi_ {m} & \dots & \phi_ {n} \end{array} \right] \tag {2.1.6}
$$
식 (2.1.4)를 만족하는 해는 각각의 $y_{m}(t)$ 에 대하여 다음과 같이 나타낼 수 있다.
$$
\mathbf {K} \phi_ {m} - \lambda_ {m} \mathbf {M} \phi_ {m} = 0 \tag {2.1.7}
$$
식 (2.1.7)은 고유치 문제이며, 자유진동 운동방정식에서 변위가 의미 있는 해를 갖기 위해서는 식 (2.1.8)의 조건을 만족해야 한다.
$$
\left| \mathbf {K} - \lambda_ {m} \mathbf {M} \right| = 0 \tag {2.1.8}
$$
식 (2.1.8)은 행렬 크기인 n 개의 해를 가지며, 작은 값부터 $\lambda_{1}, \lambda_{2}, \ldots, \lambda_{m}$ 이라한다. 또한 m 번째 고유치 $\lambda_{m}$ 에는 이에 대응하는 고유모드를 $\phi_{m}$ 이 존재한다. 식 (2.1.7)에서 질량행렬 M 과 강성행렬 K 는 대칭(symmetric) 행렬이므로 고유치 $\lambda_{m}$ 와 고유모드 $\phi_{m}$ 은 실수이다. 또한 질량행렬은 양의 정부호(positive definite)이고, 강성행렬은 양의 준정부호(positive semi-definite)이므로 $\lambda_{m} \geq 0$ 이다. 그러므로 비감쇠 자유진동 조건에서의 회전진동수 $\omega_{m}$ 은 실수이다.
외력이 존재하지 않는 상태에서 구조물은 고유모드 $\phi_{m}$ 의 형상으로 진동하며, 그 속도는 회전진동수(circular frequency) $\omega_{m}$ (radian/time) 과 같다. 구조물의 진동 속도는 고유진동수 $f_{m}$ (cycle/time) 또는 고유주기 $t_{m}$ (time/cycle) 으로 나타내기도 한다. $\omega_{m}$ , $f_{m}$ 과 $T_{m}$ 은 다음과 같은 관계를 가진다.
$$
T _ {m} = \frac {1}{f _ {m}}, \quad f _ {m} = \frac {\omega_ {m}}{2 \pi} \tag {2.1.9}
$$
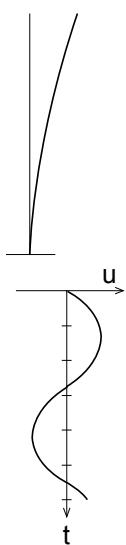
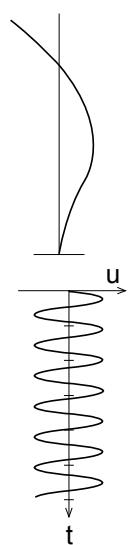
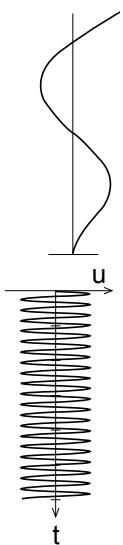
일반적으로 고유치 $\lambda_{m}$ 은 m 차 모드 형상에서 운동 에너지에 대한 변형에너지의 비율이며, 그 값이 작은 것부터 1차 모드, 2차 모드, ..., n 차 모드라 한다. 그림 2.1.1은 캔틸레버(cantilever)의 진동모드를 1차모드부터 순차적으로 나타낸 것이다.
text_image
u
t
text_image
u
t
text_image
u
t
그림 2.1.1 캔틸레버의 진동모드
midas FEA에서 구조물의 동특성을 나타내는 지표로 모드기여계수(modalparticipation factor), 모드참여질량(effective modal mass), 모드별 방향계수(modal direction factor)등을 출력하고 있다.
모드기여계수의 방향별 값은 식 (2.1.10)과 같이 계산되고, 응답스펙트럼해석이나지진하중을 받는 구조물의 시간이력해석에 사용된다.
$$
\Gamma_ {m X} = \frac {\phi_ {m} ^ {T} \mathbf {M} \mathbf {1} _ {X}}{\phi_ {m} ^ {T} \mathbf {M} \phi_ {m}}, \Gamma_ {m Y} = \frac {\phi_ {m} ^ {T} \mathbf {M} \mathbf {1} _ {Y}}{\phi_ {m} ^ {T} \mathbf {M} \phi_ {m}}, \Gamma_ {m Z} = \frac {\phi_ {m} ^ {T} \mathbf {M} \mathbf {1} _ {Z}}{\phi_ {m} ^ {T} \mathbf {M} \phi_ {m}} \tag {2.1.10}
$$
$$
\Gamma_ {m R X} = \frac {\phi_ {m} ^ {T} \mathbf {M 1} _ {R X}}{\phi_ {m} ^ {T} \mathbf {M} \phi_ {m}}, \Gamma_ {m R Y} = \frac {\phi_ {m} ^ {T} \mathbf {M 1} _ {R Y}}{\phi_ {m} ^ {T} \mathbf {M} \phi_ {m}}, \Gamma_ {m R Z} = \frac {\phi_ {m} ^ {T} \mathbf {M 1} _ {R Z}}{\phi_ {m} ^ {T} \mathbf {M} \phi_ {m}}
$$
$$
\begin{array}{l} \Gamma_ {m X}, \Gamma_ {m Y}, \Gamma_ {m Z} \quad \begin{array}{l} \text { : } m \text { 번째 모드의 전체좌표계 } X, Y, Z \text { 이동 방향 } \\ \text { 모드기여계수 } \end{array} \\ \Gamma_ {m R X}, \Gamma_ {m R Y}, \Gamma_ {m R Z} \quad \begin{array}{l} \text { : } m \text { 번째 모드의 전체좌표계 } X, Y, Z \text { 회전 방향 } \\ \text { 모드기여계수 } \end{array} \\ \end{array}
$$
$$
\begin{array}{l} \mathbf {1} _ {X}, \mathbf {1} _ {Y}, \mathbf {1} _ {Z} \quad : \text { 전체좌표계 } X, Y, Z \text { 이동 방향 자유도만 단위 } \text { 값을 갖는 방향 벡터 } \\ \mathbf {1} _ {R X}, \mathbf {1} _ {R Y}, \mathbf {1} _ {R Z} \quad : \text { 전체좌표계 } X, Y, Z \text { 회전 방향 자유도만 단위 } \text { 값을 갖는 방향 벡터 } \\ \phi_ {m} \quad : m \text { 번째 모드의 형상 } \\ \end{array}
$$
모드참여질량의 방향별 값은 모드형상에 따른 방향별 질량의 참여를 나타내는 것으로 식 (2.1.11)과 같이 계산된다. 모드의 부호가 계산에 포함되기 때문에 모드형상에 따라서 영의 값으로 계산될 수 있다. 모든 모드의 방향별 참여질량의 합은 구조물의 방향별 전체질량과 같다. 일반내진설계기준에서는 해석에 포함되는 모드참여질량의 방향별 합이 전체 질량의 90% 이상을 확보하도록 요구하고 있다. 이는해석결과에 영향을 주는 대부분의 주요 모드를 포함하도록 하기 위한 것이다.
$$
M _ {m X} ^ {*} = \frac {\left[ \phi_ {m} ^ {T} \mathbf {M} \mathbf {1} _ {X} \right] ^ {2}}{\phi_ {m} ^ {T} \mathbf {M} \phi_ {m}}, M _ {m Y} ^ {*} = \frac {\left[ \phi_ {m} ^ {T} \mathbf {M} \mathbf {1} _ {Y} \right] ^ {2}}{\phi_ {m} ^ {T} \mathbf {M} \phi_ {m}}, M _ {m Z} ^ {*} = \frac {\left[ \phi_ {m} ^ {T} \mathbf {M} \mathbf {1} _ {Z} \right] ^ {2}}{\phi_ {m} ^ {T} \mathbf {M} \phi_ {m}} \tag {2.1.11}
$$
$$
M _ {m R X} ^ {*} = \frac {\left[ \phi_ {m} ^ {T} \mathbf {M} \mathbf {1} _ {R X} \right] ^ {2}}{\phi_ {m} ^ {T} \mathbf {M} \phi_ {m}}, M _ {m R Y} ^ {*} = \frac {\left[ \phi_ {m} ^ {T} \mathbf {M} \mathbf {1} _ {R Y} \right] ^ {2}}{\phi_ {m} ^ {T} \mathbf {M} \phi_ {m}}, M _ {m R Z} ^ {*} = \frac {\left[ \phi_ {m} ^ {T} \mathbf {M} \mathbf {1} _ {R Z} \right] ^ {2}}{\phi_ {m} ^ {T} \mathbf {M} \phi_ {m}}
$$
여기서,
$$
\begin{array}{l} M _ {m X} ^ {*}, M _ {m Y} ^ {*}, M _ {m Z} ^ {*} \quad : m \text { 번째 모드의 전체좌표계 } X, Y, Z \text { 이동방향 참여질량 } \\ M _ {m R X} ^ {*}, M _ {m R Y} ^ {*}, M _ {m R Z} ^ {*}: m \text { 번째 모드의 전체좌표계 } X, Y, Z \text { 회전방향 참여질량 } \\ \end{array}
$$
모드별 방향계수는 해당모드의 전체참여질량에 대한 방향별 참여질량의 비율을 나타낸 것이다. midas FEA에서는 식 (2.1.7)과 같은 고유치문제를 해석하는데 있어서 대형구조물의 해석에 적합한 Lanczos반복법1 과 Subspace반복법2 을 이용한다.