| BEAM |
| Basic, assembled, or complex: | Assembled |
| Kinematic constraints: | JOIN + ALIGN |
| Constraint force and moment output: | $f_1, f_2, f_3, m_1, m_2, m_3$ |
| Available components: | None |
| Kinetic force and moment output: | None |
| Orientation at a: | Optional |
| Orientation at b: | Optional |
| Connector stops: | None |
| Constitutive reference lengths and angles: | None |
| Predefined friction parameters: | None |
| Contact force for predefined friction: | None |
# BUSHING
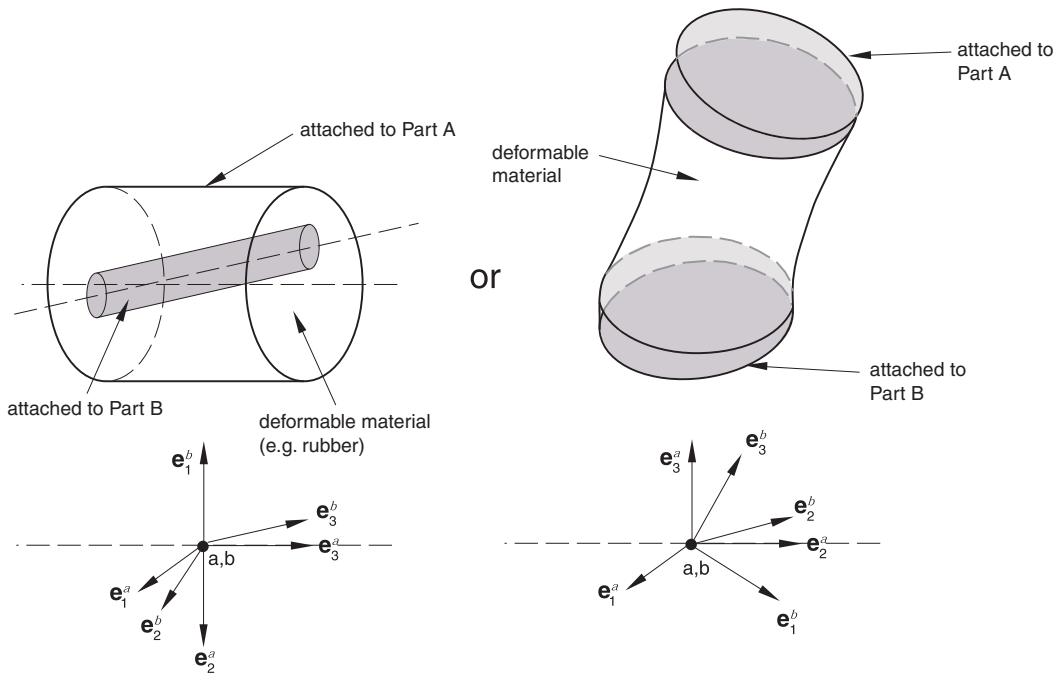
Connection type BUSHING provides a bushing-like connection between two nodes. It cannot be used in two-dimensional or axisymmetric analyses.
| Kinetic force and moment output: | $f_{1}, f_{2}, f_{3}, m_{1}, m_{2}, m_{3}$ |
| Orientation at a: | Required |
| Orientation at b: | Optional |
| Connector stops: | $l_{1}^{min} \leq x \leq l_{1}^{max}$ , $l_{2}^{min} \leq y \leq l_{2}^{max}$ , $l_{3}^{min} \leq z \leq l_{3}^{max}$ $\theta_{1}^{min} \leq \alpha_{1} \leq \theta_{1}^{max}$ , $\theta_{2}^{min} \leq \alpha_{2} \leq \theta_{2}^{max}$ , $\theta_{3}^{min} \leq \beta \leq \theta_{3}^{max}$ |
| Constitutive reference lengths and angles: | $l_{1}^{ref}, l_{2}^{ref}, l_{3}^{ref}$ $\theta_{1}^{ref}, \theta_{2}^{ref}, \theta_{3}^{ref}$ |
| Predefined friction parameters: | None |
| Contact force for predefined friction: | None |
# CARDAN
Connection type CARDAN provides a rotational connection between two nodes where the relative rotation between the nodes is parameterized by Cardan (or Bryant) angles. A Cardan-angle parameterization of finite rotations is also called a 1–2–3 or yaw-pitch-roll parameterization. Connection type CARDAN cannot be used in two-dimensional or axisymmetric analysis.
When connection type CARDAN is used with connector behavior, the relative rotation axis with the highest resistance to rotational motion should be assigned to the second component of relative rotation (component number 5) to avoid “gimbal lock,” a singularity in the rotation parameterization for relative rotation angles $\beta = \pm \pi / 2$ .
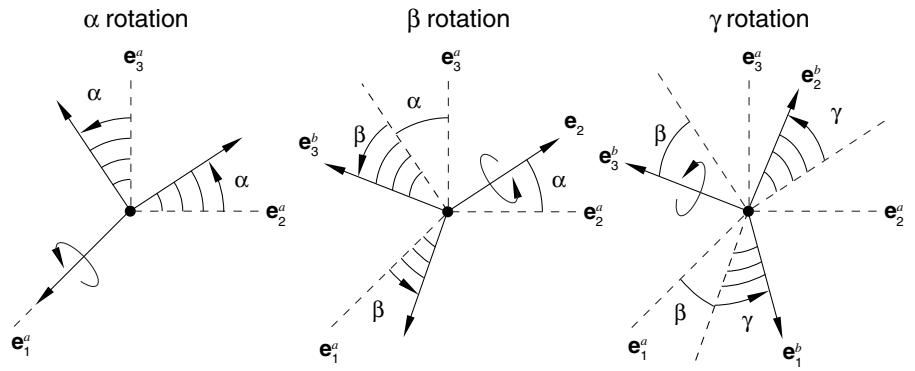
Figure 31.1.5–7 Connection type CARDAN.
# Description
The CARDAN connection does not impose kinematic constraints. A CARDAN connection is a finite rotation connection where the local directions at node b are parameterized in terms of Cardan (or Bryant) angles relative to the local directions at node a. Local directions $\{ \mathbf { e } _ { 1 } ^ { b } , \mathbf { e } _ { 2 } ^ { b } , \mathbf { e } _ { 3 } ^ { b } \}$ are positioned relative to $\{ { \bf e } _ { 1 } ^ { a } , { \bf e } _ { 2 } ^ { a } , { \bf e } _ { 3 } ^ { a } \}$ by three successive finite rotations $\alpha , \beta _ { ; }$ and $\gamma$ as follows:
1. Rotate by radians about axis ${ \bf e } _ { 1 } ^ { a }$ ;
2. Rotate by $\beta$ radians about the intermediate 2-axis, $\mathbf { e } _ { 2 } = \mathrm { c o s } \alpha \mathbf { e } _ { 2 } ^ { a } + \mathrm { s i n } \alpha \mathbf { e } _ { 3 } ^ { a }$ ; and
3. Rotate by $\gamma$ radians about axis $\mathbf { e } _ { 3 } ^ { b }$ .
Rotation angle $\beta$ should be moderate (magnitude less than $\pi / 2 )$ , whereas and may be arbitrarily large (i.e., magnitude greater than $2 \pi )$ . The Cardan angles are determined by the local directions as
$$
\alpha = - \tan^ {- 1} \left(\frac {\mathbf {e} _ {2} ^ {a} \cdot \mathbf {e} _ {3} ^ {b}}{\mathbf {e} _ {3} ^ {a} \cdot \mathbf {e} _ {3} ^ {b}}\right) + m \pi ;
$$
$$
\beta = \sin^ {- 1} \left(\mathbf {e} _ {1} ^ {a} \cdot \mathbf {e} _ {3} ^ {b}\right), - \frac {\pi}{2} < \beta < \frac {\pi}{2};
$$
$$
\gamma = - \tan^ {- 1} \left(\frac {\mathbf {e} _ {1} ^ {a} \cdot \mathbf {e} _ {2} ^ {b}}{\mathbf {e} _ {1} ^ {a} \cdot \mathbf {e} _ {1} ^ {b}}\right) + n \pi .
$$
Here, m and n are integers that account for rotations with a magnitude greater than .
The three available components of relative motion in the CARDAN connection are the changes in the Cardan angles positioning the local directions at node $\pmb { b }$ relative to the local directions at node a. Therefore,
$$
u r _ {1} = \alpha - \alpha_ {0}; \quad u r _ {2} = \beta - \beta_ {0}; \quad \text {and} \quad u r _ {3} = \gamma - \gamma_ {0};
$$
where $\alpha _ { 0 } , \beta _ { 0 }$ , and $\gamma _ { 0 }$ are the initial Cardan angles. The connector constitutive rotations are
$$
u r _ {1} ^ {m a t} = \alpha - \theta_ {1} ^ {r e f}; \quad u r _ {2} ^ {m a t} = \beta - \theta_ {2} ^ {r e f}; \quad \mathrm{and} \quad u r _ {3} ^ {m a t} = \gamma - \theta_ {3} ^ {r e f}.
$$
The kinetic moment in a CARDAN connection is determined from the three component relationships:
$$
\mathbf {m} _ {C a r d a n} = m _ {1} \mathbf {e} _ {1} ^ {a} + m _ {2} \bigl (\cos \alpha \mathbf {e} _ {2} ^ {a} + \sin \alpha \mathbf {e} _ {3} ^ {a} \bigr) + m _ {3} \mathbf {e} _ {3} ^ {b}.
$$
Summary
CARDAN
| Basic, assembled, or complex: | Basic |
| Kinematic constraints: | None |
| Constraint moment output: | None |
| Available components: | $ur_1, ur_2, ur_3$ |
| Kinetic moment output: | $m_1, m_2, m_3$ |
| Orientation at a: | Required |
| Orientation at b: | Optional |
| Connector stops: | $\theta_1^{min} \leq \alpha \leq \theta_1^{max}$ , $\theta_2^{min} \leq \beta \leq \theta_2^{max}$ , $\theta_3^{min} \leq \gamma \leq \theta_3^{max}$ |
| Constitutive reference angles: | $\theta_1^{ref}, \theta_2^{ref}, \theta_3^{ref}$ |
| Predefined friction parameters: | None |
| Contact force for predefined friction: | None |
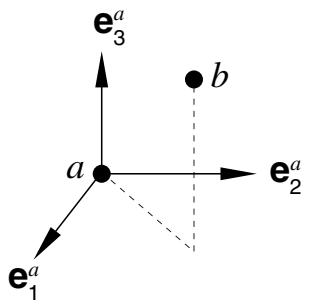
# CARTESIAN
Connection type CARTESIAN provides a connection between two nodes where the change in position is measured in three local connection directions for node a, shown in Figure 31.1.5–8.
| CARTESIAN |
| Basic, assembled, or complex: | Basic |
| Kinematic constraints: | None |
| Constraint force output: | None |
| Available components: | $u_1, u_2, u_3$ |
| Kinetic force output: | $f_1, f_2, f_3$ |
| Orientation at a: | Optional |
| Orientation at b: | Ignored |
| Connector stops: | $l_1^{min} \leq x \leq l_1^{max}$ , $l_2^{min} \leq y \leq l_2^{max}$ , $l_3^{min} \leq z \leq l_3^{max}$ |
| Constitutive reference lengths: | $l_1^{ref}, l_2^{ref}, l_3^{ref}$ |
| Predefined friction parameters: | None |
| Contact force for predefined friction: | None |
# CONSTANT VELOCITY
Connection type CONSTANT VELOCITY provides the rotational part of connection type CVJOINT. It cannot be used in two-dimensional or axisymmetric analysis. Furthermore, the connection type does not have available components of relative motion. To include connector behavior in flexural motion, use connection type FLEXION-TORSION with the torsion angle set to zero.
This connection type models physical connectors that under certain conditions transmit a constant spinning velocity about misaligned shafts.
