| CYLINDRICAL |
| Basic, assembled, or complex: | Assembled |
| Kinematic constraints: | SLOT + REVOLUTE |
| Constraint force and moment output: | $f_{2}, f_{3}, m_{2}, m_{3}$ |
| Available components: | $u_{1}, ur_{1}$ |
| Kinetic force and moment output: | $f_{1}, m_{1}$ |
| Orientation at a: | Required |
| Orientation at b: | Optional |
| Connector stops: | $l_{1}^{min} \leq l \leq l_{1}^{max}$ $\theta_{1}^{min} \leq \alpha \leq \theta_{1}^{max}$ |
| Constitutive reference lengths and angles: | $l_{1}^{ref}, \theta_{1}^{ref}$ |
| Predefined friction parameters: | Required: R; optional: L, $F_{C}^{int}$ |
| Contact force for predefined friction: | $F_{C}$ |
# EULER
Connection type EULER provides a rotational connection between two nodes where the total relative rotation between the nodes is parameterized by Euler angles. An Euler-angle parameterization of finite rotations is also called a 3–1–3 or precession-nutation-spin parameterization. Connection type EULER cannot be used in two-dimensional or axisymmetric analysis.
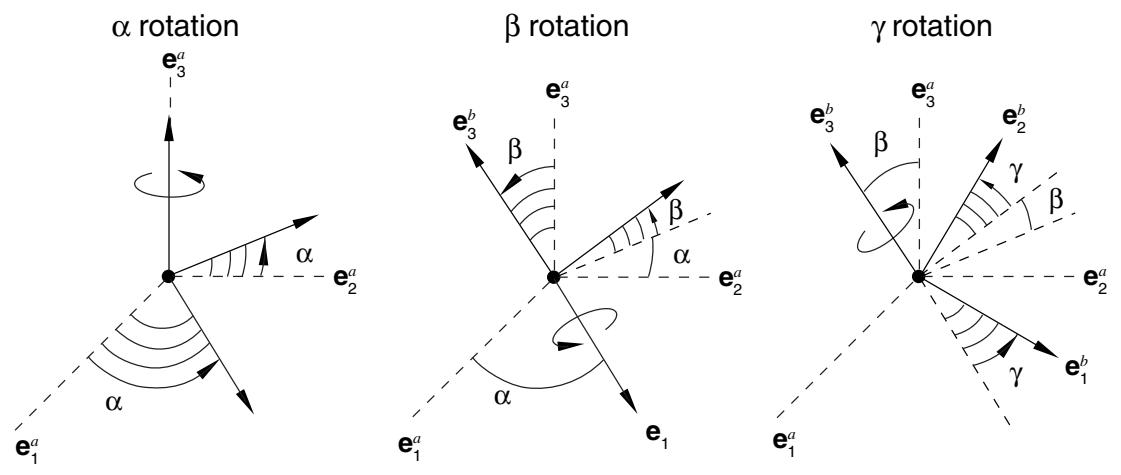
Figure 31.1.5–12 Connection type EULER.
# Description
The EULER connection does not impose kinematic constraints. An EULER connection is a finite rotation connection where the local directions at node b are parameterized in terms of Euler angles relative to the local directions at node a. Local directions $\{ \mathbf { e } _ { 1 } ^ { b } , \mathbf { e } _ { 2 } ^ { b } , \mathbf { e } _ { 3 } ^ { b } \}$ are positioned relative to $\{ { \bf e } _ { 1 } ^ { a } , { \bf e } _ { 2 } ^ { a } , { \bf e } _ { 3 } ^ { a } \}$ by three successive finite rotations $\alpha , \beta ,$ , and $\gamma$ as follows:
1. Rotate by radians about axis ${ \bf e } _ { 3 } ^ { a }$ ;
2. Rotate by $\beta$ radians about the intermediate 1-axis, $\mathbf { e } _ { 1 } = \mathrm { c o s } \alpha \mathbf { e } _ { 1 } ^ { a } + \mathrm { s i n } \alpha \mathbf { e } _ { 2 } ^ { a } ;$ ;
3. Rotate by $\gamma$ radians about axis $\mathbf { e } _ { 3 } ^ { b }$ .
The Euler angles are determined by the local directions as
$$
\alpha = - \tan^ {- 1} \left(\frac {\mathbf {e} _ {1} ^ {a} \cdot \mathbf {e} _ {3} ^ {b}}{\mathbf {e} _ {2} ^ {a} \cdot \mathbf {e} _ {3} ^ {b}}\right) + i \pi ;
$$
$$
\beta = \cos^ {- 1} \left(\mathbf {e} _ {3} ^ {a} \cdot \mathbf {e} _ {3} ^ {b}\right) + j \pi ;
$$
$$
\gamma = \tan^ {- 1} \left(\frac {\mathbf {e} _ {3} ^ {a} \cdot \mathbf {e} _ {1} ^ {b}}{\mathbf {e} _ {3} ^ {a} \cdot \mathbf {e} _ {2} ^ {b}}\right) + k \pi .
$$
Here $i , j ,$ and $\pmb { k }$ are integers that account for rotations with magnitudes greater than $\pi .$ . Initially, the intermediate rotation angle $\beta$ is chosen in the interval $0 \leq \beta \leq \pi$ .
If the intermediate rotation is an even multiple of $\pi , \beta = 2 m \pi$ , where $m = 0 , \pm 1 , \pm 2 , . . .$ , the other two Euler angles become non-unique. In this case
$$
\alpha + \gamma = \tan^ {- 1} \left(\frac {\mathbf {e} _ {2} ^ {a} \cdot \mathbf {e} _ {1} ^ {b}}{\mathbf {e} _ {1} ^ {a} \cdot \mathbf {e} _ {1} ^ {b}}\right) + n \pi .
$$
Similarly, if the intermediate rotation is an odd multiple of $\pi , \beta = ( 2 m + 1 ) \pi$ , where $m = 0 , \pm 1 , \pm 2 , . . . _ $ the other two Euler angles become nonunique as well. In this case
$$
\alpha - \gamma = \tan^ {- 1} \left(\frac {\mathbf {e} _ {2} ^ {a} \cdot \mathbf {e} _ {1} ^ {b}}{\mathbf {e} _ {1} ^ {a} \cdot \mathbf {e} _ {1} ^ {b}}\right) + n \pi .
$$
In both of these cases a singularity results in the rotation parameterization when the ${ \bf e } _ { 3 } ^ { a }$ and $\mathbf { e } _ { 3 } ^ { b }$ axes align. The EULER connection should be used in such a way that these axes do not align throughout the computation. For a singularity-free condition Abaqus will choose $\alpha$ and $\gamma$ such that a smooth parameterization results for the above values of the intermediate angle $\beta .$
The available components of relative motion in the EULER connection are the changes in the Euler angles that position the local directions at node b relative to the local directions at node a. Therefore,
$$
u r _ {1} = \alpha - \alpha_ {0}; \quad u r _ {2} = \beta - \beta_ {0}; \quad \text {and} \quad u r _ {3} = \gamma - \gamma_ {0};
$$
where $\alpha _ { 0 } , \beta _ { 0 }$ , and $\gamma _ { 0 }$ are the initial Euler angles. The connector constitutive rotations are
$$
u r _ {1} ^ {m a t} = \alpha - \theta_ {1} ^ {r e f}; \quad u r _ {2} ^ {m a t} = \beta - \theta_ {2} ^ {r e f}; \quad \text {and} \quad u r _ {3} ^ {m a t} = \gamma - \theta_ {3} ^ {r e f}.
$$
The kinetic moment in a EULER connection is determined from the three component relationships:
$$
\mathbf {m} _ {E u l e r} = m _ {1} \mathbf {e} _ {3} ^ {a} + m _ {2} \bigl (\cos \alpha \mathbf {e} _ {1} ^ {a} + \sin \alpha \mathbf {e} _ {2} ^ {a} \bigr) + m _ {3} \mathbf {e} _ {3} ^ {b}.
$$
Summary
# EULER
| Basic, assembled, or complex: | Basic |
| Kinematic constraints: | None |
| Constraint moment output: | None |
| Available components: | $ur_1, ur_2, ur_3$ |
| Kinetic moment output: | $m_1, m_2, m_3$ |
| Orientation at a: | Required |
| Orientation at b: | Optional |
| Connector stops: | $\theta_1^{min} \leq \alpha \leq \theta_1^{max}$ , $\theta_2^{min} \leq \beta \leq \theta_2^{max}$ , $\theta_3^{min} \leq \theta \leq \theta_3^{max}$ |
| Constitutive reference angles: | $\theta_1^{ref}, \theta_2^{ref}, \theta_3^{ref}$ |
| Predefined friction parameters: | None |
| Contact force for predefined friction: | None |