| TRANSLATOR |
| Basic, assembled, or complex: | Assembled |
| Kinematic constraints: | SLOT + ALIGN |
| Constraint force and moment output: | $f_{2}, f_{3}, m_{1}, m_{2}, m_{3}$ |
| Available components: | $u_{1}$ |
| Kinetic force and moment output: | $f_{1}$ |
| Orientation at $a$ : | Required |
| Orientation at $b$ : | Optional |
| Connector stops: | $l_{1}^{min} \leq l \leq l_{1}^{max}$ |
| Constitutive reference lengths: | $l_{1}^{ref}$ |
| Predefined friction parameters: | Optional: $R_{r}, L, F_{C}^{int}$ |
| Contact force for predefined friction: | $F_{C}$ |
# UJOINT
Connection type UJOINT joins the position of two nodes and provides a universal constraint between their rotational degrees of freedom. Connection type UJOINT cannot be used in two-dimensional or axisymmetric analysis.
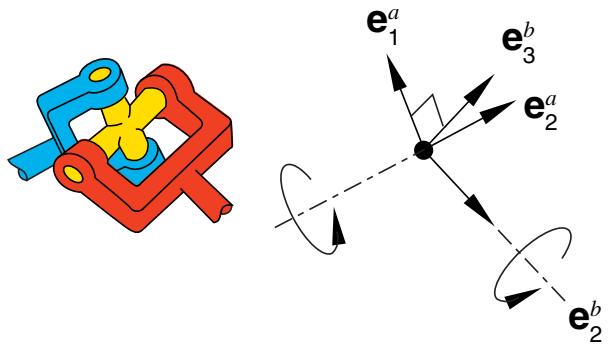
| Basic, assembled, or complex: | Assembled |
| Kinematic constraints: | JOIN + UNIVERSAL |
| Constraint force and moment output: | $f_1, f_2, f_3, m_2$ |
| Available components: | $ur_1, ur_3$ |
| Kinetic force and moment output: | $m_1, m_3$ |
| Orientation at a: | Required |
| Orientation at b: | Optional |
| Connector stops: | $\theta_1^{min} \leq \gamma \leq \theta_1^{max}$ $\theta_3^{min} \leq \gamma \leq \theta_3^{max}$ |
| Constitutive reference lengths: | $\theta_1^{ref}, \theta_3^{ref}$ |
| Predefined friction parameters: | Required: $R_p, L_a$ ; optional: $R_a, L_s, M_{C_1}^{int}, M_{C_3}^{int}$ |
| Contact moments for predefined friction: | $M_{C_1}, M_{C_3}$ |
# UNIVERSAL
Connection type UNIVERSAL provides a connection between two nodes where the rotations are fixed about one local direction and free about two others. Connection type UNIVERSAL provides the rotational part of a UJOINT connection. Connection type UNIVERSAL cannot be used in two-dimensional or axisymmetric analysis.
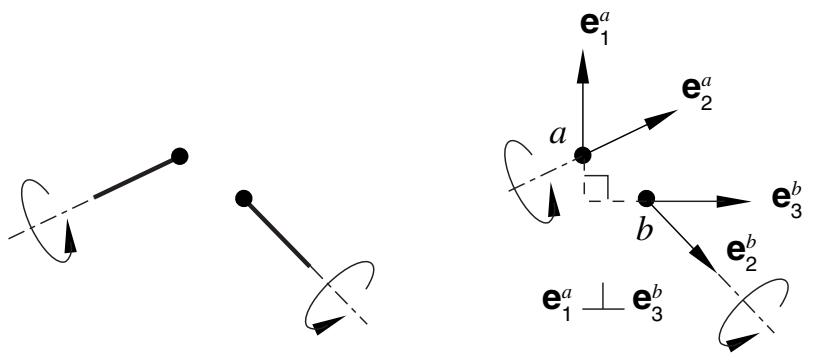
| UNIVERSAL |
| Basic, assembled, or complex: | Basic |
| Kinematic constraints: | $\mathbf{e}_{1}^{a} \cdot \mathbf{e}_{3}^{b} = 0$ |
| Constraint moment output: | $m_{2}$ |
| Available components: | $ur_{1}, ur_{3}$ |
| Kinetic moment output: | $m_{1}, m_{3}$ |
| Orientation at a: | Required |
| Orientation at b: | Optional |
| Connector stops: | $\theta_{1}^{min} \leq \alpha \leq \theta_{1}^{max}$ , $\theta_{3}^{min} \leq \gamma \leq \theta_{3}^{max}$ |
| Constitutive reference angles: | $\theta_{1}^{ref}, \theta_{3}^{ref}$ |
| Predefined friction parameters: | None |
| Contact force for predefined friction: | None |
# WELD
Connection type WELD provides a fully bonded connection between two nodes.
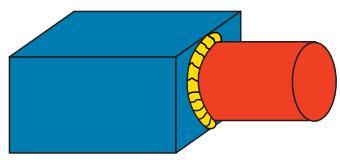
| Basic, assembled, or complex: | Assembled |
| Kinematic constraints: | JOIN + ALIGN |
| Constraint force and moment output: | $f_{1}, f_{2}, f_{3}, m_{1}, m_{2}, m_{3}$ |
| Available components: | None |
| Kinetic force and moment output: | None |
| Orientation at a: | Optional |
| Orientation at b: | Optional |
| Connector stops: | None |
| Constitutive reference lengths and angles: | None |
| Predefined friction parameters: | None |
| Contact force for predefined friction: | None |