| Type of analysis | Description | Typical formulation used | Stress and strain measures |
| Materially-nonlinear-only | Infinitesimal displacements and strains; the stress-strain relation is nonlinear | Materially-nonlinear-only (MNO) | Engineering stress and strain |
| Large displacements, large rotations, but small strains | Displacements and rotations of fibers are large, but fiber extensions and angle changes between fibers are small; the stress-strain relation may be linear or nonlinear | Total Lagrangian (TL) | Second Piola-Kirchhoff stress, Green-Lagrange strain |
| Updated Lagrangian (UL) | Cauchy stress, Almansi strain |
| Large displacements, large rotations, and large strains | Fiber extensions and angle changes between fibers are large, fiber displacements and rotations may also be large; the stress-strain relation may be linear or nonlinear | Total Lagrangian (TL) | Second Piola-Kirchhoff stress, Green-Lagrange strain |
| Updated Lagrangian (UL) | Cauchy stress, logarithmic strain |
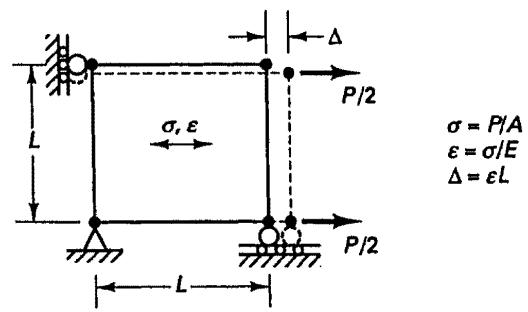
Figure 6.1 gives an illustration of the types of problems that are encountered, as listed in Table 6.1. We should note that in a materially-nonlinear-only analysis, the nonlinear effect lies only in the nonlinear stress-strain relation. The displacements and strains are infinitesimally small; therefore the usual engineering stress and strain measures can be employed in the response description. Considering the large displacement but small strain conditions, we note that in essence the material is subjected to infinitesimally small strains measured in a body-attached coordinate frame $x'$ , $y'$ while this frame undergoes large rigid body displacements and rotations. The stress-strain relation of the material can be linear or nonlinear.
As shown in Fig. 6.1 and Table 6.1, the most general analysis case is the one in which the material is subjected to large displacements and large strains. In this case the stress-strain relation is also usually nonlinear.
In addition to the analysis categories listed in Table 6.1, Fig. 6.1 illustrates another type of nonlinear analysis, namely, the analysis of problems in which the boundary conditions change during the motion of the body under consideration. This situation arises in