| MASTER BEAM | EPBM | 1 |
| C | ********** | EPBM | 2 |
| C | | EPBM | 3 |
| C *** | ELSTO-PLASTIC NONLAYERED TIMOSHENKO BEAM PROGRAM | EPBM | 4 |
| C | | EPBM | 5 |
| C | ********** | EPBM | 6 |
| . | COMMON/UNIM1/NPOIN,NELEM,NBOUN,NLOAD,NPROP,NNODE,IINCS,IITER, | EPBM | 7 |
| KRESL,NCHEK,TOLER,NALGO,NSVAB,NDOFN,NINCS,NEVAB, | EPBM | 8 |
| NITER,NOUTP,FACTO | EPBM | 9 |
| COMMON/UNIM2/PROPS(5,4),COORD(26),LNODS(25,2),IFPRE(52), | EPBM | 10 |
| FIXED(52),TLOAD(25,4),RLOAD(25,4),ELOAD(25,4), | EPBM | 11 |
| MATNO(25),STRES(25,2),PLAST(25),XDISP(52), | EPBM | 12 |
```csv
TDISP(26,2),TREAC(26,2),ASTIF(52,52),ASLOD(52),
REACT(52),FRESV(1352),PEFIX(52),ESTIF(4,4)
CALL DATA
CALL INITIAL
DO 30 IINCS=1,NINCS
CALL INCLOD
DO 10 IITER=1,NITER
CALL NONAL
IF(KRESL.EQ.1) CALL STIFFB
CALL ASSEMB
IF(KRESL.EQ.1) CALL GREDUC
IF(KRESL.EQ.2) CALL RESOLV
CALL BAKSUB
CALL REFORB
CALL CONUND
IF(NCHEK.EQ.0) GO TO 20
IF(IITER.EQ.1.AND.NOUTP.EQ.1) CALL RESULT
IF(NOUTP.EQ.2) CALL RESULT
10 CONTINUE
WRITE(6,900)
900 FORMAT(1H0,5X,'SOLUTION NOT CONVERGED')
STOP
20 CALL RESULT
30 CONTINUE
STOP
END
EPBM 13
EPBM 14
EPBM 15
EPBM 16
EPBM 17
EPBM 18
EPBM 19
EPBM 20
EPBM 21
EPBM 22
EPBM 23
EPBM 24
EPBM 25
EPBM 26
EPBM 27
EPBM 28
EPBM 29
EPBM 30
EPBM 31
EPBM 32
EPBM 33
EPBM 34
EPBM 35
EPBM 36
EPBM 37
EPBM 38
.
```
Subroutine STIFFB The purpose of this routine is to evaluate the element stiffness matrices and store them on disc prior to their use in the assembly and equation solving routines.
```csv
SUBROUTINE STIFFB STFB 1
C**************************STFB 2
C STFB 3
C *** CALCULATES ELEMENT STIFFNESS MATRICES STFB 4
C STFB 5
C**************************STFB 6
COMMON/UNIM1/NPOIN,NELEM,NBOUN,NLOAD,NPROP,NNODE,IINCS,IITER, STFB 7
KRESL,NCHEK,TOLER,NALGO,NSVAB,NDOFN,NINCS,NEVAB, STFB 8
NITER,NOUTP,FACTO STFB 9
COMMON/UNIM2/PROPS(5,4),COORD(26),LNODS(25,2),IFPRE(52), STFB 10
FIXED(52),TLOAD(25,4),RLOAD(25,4),ELOAD(25,4), STFB 11
MATNO(25),STRES(25,2),PLAST(25),XDISP(52), STFB 12
TDISP(26,2),TREAC(26,2),ASTIF(52,52),ASLOD(52), STFB 13
REACT(52),FRESV(1352),PEFIX(52),ESTIF(4,4) STFB 14
REWIND 1 STFB 15
DO 20 IELEM=1,NELEM STFB 16
LPROP=MATNO(IELEM) STFB 17
EIVAL=PROPS(LPROP,1) STFB 18
SVALU=PROPS(LPROP,2) STFB 19
HARDS=PROPS(LPROP,4) STFB 20
NODE1=LNODS(IELEM,1) STFB 21
NODE2=LNODS(IELEM,2) STFB 22
ELENG=ABS(COORD(NODE2)-COORD(NODE1)) STFB 23
IF(PLAST(IELEM).NE.0.0) EIVAL=EIVAL*(1.0-EIVAL/(EIVAL+HARDS)) STFB 24
VALU1=0.5*SVALU STFB 25
VALU2=SVALU/ELENG STFB 26
VALU3=EIVAL/ELENG STFB 27
VALU4=0.25*SVALU*ELENG STFB 28
ESTIF(1,1)= VALU2 STFB 29
ESTIF(1,2)= VALU1 STFB 30
```
| SUBROUTINE REFORB | RFRB | 1 |
| C********** | RFRB | 2 |
| C | RFRB | 3 |
| C *** CALCULATES INTERNAL EQUIVALENT NODAL FORCES | RFRB | 4 |
| C | RFRB | 5 |
| C********** | RFRB | 6 |
| COMMON/UNIM1/NPOIN.NELEM,NBOUN,NLOAD,NPROP,NNODE,IINCS,IITER, | RFRB | 7 |
| KRESL,NCHEK,TOLER,NALGO,NSVAB,NDOFN,NINCS,NEVAB, | RFRB | 8 |
| NITER,NOUTP,FACTO | RFRB | 9 |
| COMMON/UNIM2/PROPS(5,4),COORD(26),LNODS(25,2),IFPRE(52), | RFRB | 10 |
| FIXED(52),TLOAD(25,4),RLOAD(25,4),ELOAD(25,4), | RFRB | 11 |
| MATNO(25),STRES(25,2),PLAST(25),XDISP(52), | RFRB | 12 |
| TDISP(26,2),TREAC(26,2),ASTIF(52,52),ASLOD(52), | RFRB | 13 |
| REACT(52),FRESV(1352),PEFIX(52),ESTIF(4,4) | RFRB | 14 |
| DO 10 IELEM=1,NELEM | RFRB | 15 |
| DO 10 IEVAB=1,NEVAB | RFRB | 16 |
| 10 ELOAD(IELEM,IEVAB)=0.0 | RFRB | 17 |
| DO 70 IELEM=1,NELEM | RFRB | 18 |
| LPROP=MATNO(IELEM) | RFRB | 19 |
| EIVAL=PROPS(LPROP,1) | RFRB | 20 |
| SVALU=PROPS(LPROP,2) | RFRB | 21 |
| YIELD=PROPS(LPROP,3) | RFRB | 22 |
| HARDS=PROPS(LPROP,4) | RFRB | 23 |
| NODE1=LNODS(IELEM,1) | RFRB | 24 |
| NODE2=LNODS(IELEM,2) | RFRB | 25 |
| ELENG=ABS(COORD(NODE2)-COORD(NODE1)) | RFRB | 26 |
| WNOD1=XDISP(NODE1*NDOFN-1) | RFRB | 27 |
| WNOD2=XDISP(NODE2*NDOFN-1) | RFRB | 28 |
| THTA1=XDISP(NODE1*NDOFN) | RFRB | 29 |
| THTA2=XDISP(NODE2*NDOFN) | RFRB | 30 |
| STRAN=(THTA1-THTA2)/ELENG | RFRB | 31 |
| STLIN=STRAN*EIVAL | RFRB | 32 |
| STCUR=STRES(IELEM,1)+STLIN | RFRB | 33 |
| PREYS=YIELD+HARDS*ABS(PLAST(IELEM)) | RFRB | 34 |
| IF(ABS(STRES(IELEM,1)).GE.PREYS) GO TO 20 | RFRB | 35 |
```txt
ESCUR=ABS(STCUR)-PREYS RFRB 36
IF(ESCUR.LE.0.0) GO TO 40 RFRB 37
RFACT=ESCUR/ABS(STLIN) RFRB 38
GO TO 30 RFRB 39
20 IF(STRES(IELEM,1).GT.0.0.AND.STLIN.LE.0.0) GO TO 40 RFRB 40
IF(STRES(IELEM,1).LT.0.0.AND.STLIN.GE.0.0) GO TO 40 RFRB 41
RFACT=1.0 RFRB 42
30 REDUC=1.0-RFACT RFRB 43
STRES(IELEM,1)=STRES(IELEM,1)+REDUC*STLIN+ RFRB 44
RFACT*EIVAL*(1.0-EIVAL/(EIVAL+HARDS))*STRAN RFRB 45
PLAST(IELEM)=PLAST(IELEM)+RFACT*STRAN*EIVAL/(EIVAL+HARDS) RFRB 46
GO TO 50 RFRB 47
40 STRES(IELEM,1)=STRES(IELEM,1)+STLIN RFRB 48
50 STRES(IELEM,2)=STRES(IELEM,2)+(SVALU/ELENG)*(WNOD2-WNOD1) RFRB 49
-0.5*SVALU*(THTA1+THTA2) RFRB 50
ELOAD(IELEM,1)=ELOAD(IELEM,1)-STRES(IELEM,2) RFRB 51
ELOAD(IELEM,2)=ELOAD(IELEM,2)+STRES(IELEM,1) RFRB 52
-0.5*ELENG*STRES(IELEM,2) RFRB 53
ELOAD(IELEM,3)=ELOAD(IELEM,3)+STRES(IELEM,2) RFRB 54
ELOAD(IELEM,4)=ELOAD(IELEM,4)-STRES(IELEM,1) RFRB 55
-0.5*ELENG*STRES(IELEM,2) RFRB 56
70 CONTINUE RFRB 57
RETURN RFRB 58
END RFRB 59
```
RFRB 15-17 Zero space for storing $\pmb{p}$ .
RFRB 18-57 For each element evaluate $p^{(e)}$ and assemble into $p$ .
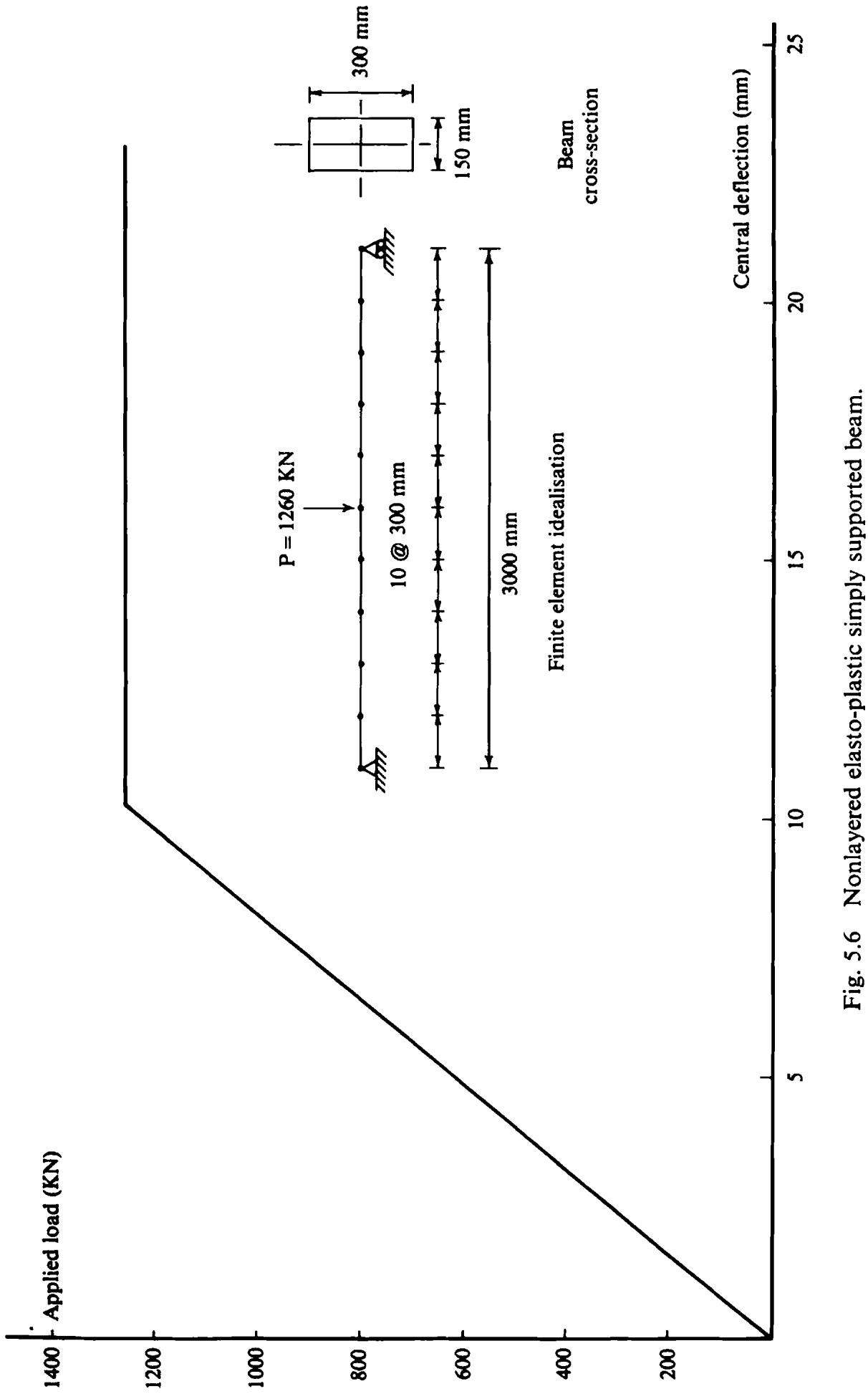
# 5.4.6 Examples of nonlayered elasto-plastic Timoshenko beam analysis
Two numerical examples are considered. The first example, Example 5.1, involves the yielding of a rectangular simple beam under uniformly distributed load. The beam material has the following properties:
$$
E = 2 1 0 \cdot 0 \mathrm{kN} / \mathrm{mm} ^ {2}
$$
$$
\nu = 0 \cdot 3
$$
$$
\sigma_ {0} = 0 \cdot 2 5 \mathrm{kN} / \mathrm{mm} ^ {2}
$$
$$
H ^ {\prime} = 0 \cdot 0
$$
and the beam proportions are:
$$
b = 1 5 0 \mathrm{mm}
$$
$$
t = 3 0 0 \mathrm{mm}
$$
$$
l = 3 0 0 0 \mathrm{mm}
$$
Typical input data is provided in Appendix IV.
The problem, finite element idealisation employed and the results are illustrated in Fig. 5.6, which shows that the beam fails as soon as a plastic hinge forms at the centre of the beam. Note that the beam material is assumed to have no strain hardening.
The second example considered, Example 5.2, is the clamped I beam shown in Fig. 5.7. The beam has the same material properties as those of Example 5.1.
The dimensions and finite element discretisation of the beam are given in Fig. 5.7; the load-displacement relationship at the beam centre is also provided. It is seen that there is an initial loss of stiffness corresponding to the