| VISC 64 | For each load increment, initialise the time step length. |
| VISC 65 | Enter the time-stepping loop for the current load increment. |
| VISC 66 | Compute the total time elapsed. |
| VISC 70 | For the first timestep of the first load increment prepare for a full equation solution rather than a resolution for an explicit formulation. For the implicit or semi-implicit algorithm a complete equation solution is required each and every time-step. |
| VISC 73–85 | Formulate the element stiffnesses and solve the resulting equations. |
| VISC 89–94 | Calculate quantities at the end of the timestep and evaluate the loads for the next timestep. |
| VISC 98–99 | Check for convergence of the time stepping process to steady state conditions. |
| VISC 103–105 | Check to see if either displacement or stress output is required for this timestep. |
| VISC 106–107 | Set KOUTP = 2 for displacement output only and KOUTP = 3 for both stress and displacement output. |
| VISC 108–110 | Output the results. |
| VISC 115 | If steady state conditions have been reached, output the converged results, increment the loads and proceed with the time-stepping process. |
# 8.14 General comparison of implicit and explicit time integration schemes
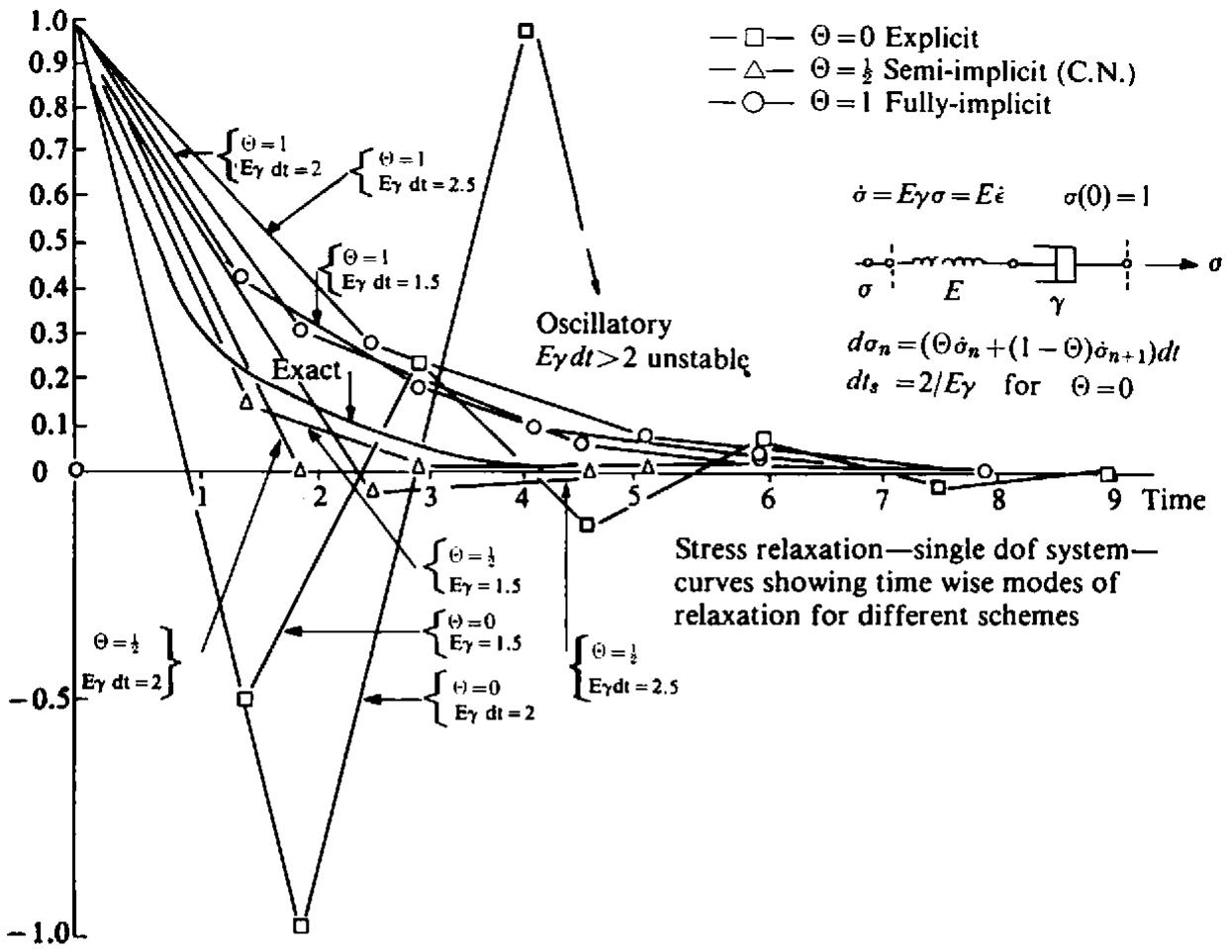
Before discussing the general case of a two-dimensional continuum it is instructive to consider the behaviour of a single degree of freedom system. In particular we will consider the response of a simple linear Maxwell model, as illustrated in Fig. 8.2. This situation is equivalent to the uniaxial viscoplastic model when the initial yield or threshold value, $F_{0}$ , is reduced to zero. Figure 8.2 shows the stress relaxation histories for different time integration schemes when the model is subjected to a constant total strain. It is observed that all results obtained using the fully implicit scheme ( $\Theta = 1$ ) lie to one side of the theoretical solution while the semi-implicit method ( $\Theta = \frac{1}{2}$ ) gives results which lie to either side of the true curve. It is also evident that the explicit method ( $\Theta = 0$ ) gives an oscillatory solution with the rate of convergence decreasing as the time step stability limit is approached. However, in each case the steady state solution is eventually correctly predicted. For the solution of elasto-plastic problems by use of the viscoplastic algorithm it is only the steady state solution that is of importance. Similarly in problems of creep, the transient stage may not be of interest in itself, as long as the steady state values are correctly arrived at.
For problems which are geometrically linear the solution process simplifies considerably. The strain matrix $B^{n}$ is then constant throughout the analysis and from (8.19) it is seen to be equal to $B_{0}$ . For solution by the explicit time