| 1 | Set iteration counter i = 0. |
| 2 | Begin predictor phase in which we set |
| $d_{n+1}^{[i]} = \tilde{d}_{n+1} = d_n + \Delta tv_n + \Delta t^2(1-2\beta)a_n/2$ | (i) |
| $v_{n+1}^{[i]} = \tilde{v}_{n+1} = v_n + \Delta t(1-\gamma)a_n$ | (ii) |
| $a_{n+1}^{[i]} = [d_{n+1}^{[i]} - \tilde{d}_{n+1}]/(\Delta t^2\beta) = 0.$ | (iii) |
| 3 | Evaluate residual forces using the equation |
| $\psi^{[i]} = f_{n+1} - Ma_{n+1}^{[i]} - p(d_{n+1}^{[i]}, v_{n+1}^{[i]}).$ | (iv) |
| 4 | If required, form the effective stiffness matrix using the expression |
| $K^* = M/(\Delta t^2\beta) + \gamma C_T/(\Delta t\beta) + K_T(d_{n+1}^{[i]}).$ | (v) |
| Otherwise use a previously calculated $K^*$ . |
| 5 | Factorize, forward reduction and backsubstitute as required to solve |
| $K^* \Delta d^{[i]} = \psi^{[i]}$ . | (vi) |
| 6 | Enter corrector phase in which we set |
| $d_{n+1}^{[i+1]} = d_{n+1}^{[i]} + \Delta d^{[i]}$ | (vii) |
| $a_{n+1}^{[i+1]} = [d_{n+1}^{[i+1]} - \tilde{d}_{n+1}]/(\Delta t^2\beta)$ | (viii) |
| $v_{n+1}^{[i+1]} = v_{n+1} + \Delta t\gamma a_{n+1}^{[i+1]}$ . | (ix) |
| 7 | If $\Delta d^{[i]}$ and/or $\psi^{[i]}$ do not satisfy the convergence conditions then set i = i+1 and go to step 3, otherwise continue. |
| 8 | Set | (x) |
| $d_{n+1} = d_{n+1}^{[i+1]}$ | (xi) |
| $v_{n+1} = v_{n+1}^{[i+1]}$ | (xii) |
| $a_{n+1} = a_{n+1}^{[i+1]}$ | |
| for use in the next time step. Also set n = n+1, form p and begin next time step. |
\* In this chapter $\gamma$ is a Newmark parameter and not the viscoplastic fluidity parameter. $\dagger K^{*}\Delta d^{[i]} = \psi^{[i]}$ .
# 11.2.2 Predictor-corrector algorithm
Let us now consider an 'explicit' algorithm associated with the Newmark schemes described earlier. In this explicit predictor-corrector algorithm we assume that the mass matrix $M$ is diagonal and we make use of the expression
$$
M a _ {n + 1} + p \left(\tilde {d} _ {n + 1}, \tilde {v} _ {n + 1}\right) = f _ {n + 1} \tag {11.9}
$$
Notice that the calculation is explicit since we use corrector values obtained from information given in the previous step.
As we would like to eventually combine the implicit and explicit methods we organise our implementation of this explicit method in a similar fashion to the implementation given of the implicit scheme in the previous section. Table 11.2 summarises the algorithm.
Table 11.2 Explicit predictor-corrector algorithm
| 1 | Begin predictor phase by setting $d_{n+1}^{[0]} = \tilde{d}_{n+1} = d_n + \Delta t v_n + \Delta t^2 (1 - 2\beta) a_n / 2$ (i) $v_{n+1}^{[0]} = \tilde{v}_{n+1} = v_n + \Delta t (1 - \gamma) a_n$ (ii) $a_{n+1}^{[0]} = 0.$ (iii) |
| 2 | Evaluate the residual forces using the equation $\psi^{[0]} = f_{n+1} - p(d_{n+1}^{[0]}, v_{n+1}^{[0]}).$ (iv) |
| 3 | If required, form the ‘effective’ stiffness matrix using the expression $K^* = M / (\Delta t^2 \beta).$ (v)Note that as the mass matrix $M$ does not change $K^*$ will be formed once only. |
| 4 | Perform factorization, forward reduction and backsubstitution as required to solve $K^* \Delta d^{[0]} = \psi^{[0]}$ (vi) |
| 5 | Enter the corrector phase in which we set $d_{n+1}^{[1]} = d_{n+1}^{[0]} + \Delta d^{[0]}$ (vii) $a_{n+1}^{[1]} = [d_{n+1}^{[1]} - \tilde{d}_{n+1}] / (\Delta t^2 \beta)$ (viii) $v_{n+1}^{[1]} = v_{n+1} + \Delta t \gamma a_{n+1}^{[1]}$ . (ix) |
| 6 | Set $d_{n+1} = d_{n+1}^{[1]}$ (x) $v_{n+1} = v_{n+1}^{[1]}$ (xi) $a_{n+1} = a_{n+1}^{[1]}$ (xii)for use in the next time step. Also set $n = n+1$ , form $p$ and begin next time step. |
# 11.3 Implicit-explicit algorithm
# 11.3.1 Introduction
We now combine the methods described in Sections 11.2.1 and 11.2.2 so that the finite element mesh contains two groups of elements: the implicit group and the explicit group. The superscripts I and E will henceforth refer to the implicit and explicit groups respectively.
In the implicit-explicit algorithm we iterate within each time step in order to satisfy the equation
$$
M a _ {n + 1} + p ^ {I} (d _ {n + 1}, v _ {n + 1}) + p ^ {E} (\tilde {d} _ {n + 1}, \tilde {v} _ {n + 1}) = f _ {n + 1} \tag {11.10}
$$
in which $M = M^{I} + M^{E}$ and $f_{n+1} = f_{n+1}^{I} + f_{n+1}^{E}$ . Note that we assume $M^{E}$ is diagonal.
# 11.3.2 The structure of the effective stiffness matrix
The algorithm, which is summarised in Table 11.3, is very similar to the implicit algorithm given in Section 11.2.2. The profile structure of $K^{*}$ is very interesting. It has diagonal subregions corresponding to the explicit group of elements. Elsewhere, $K^{*}$ has a profile structure which corresponds to the connectivity of the implicit group only.
Table 11.3 Implicit-explicit algorithm
| 1 | Set iteration counter i = 0. |
| 2 | Begin predictor phase in which we set |
| $d_{n+1}^{[i]} = \tilde{d}_{n+1} = d_n + \Delta tv_n + \Delta t^2(1-2\beta)a_n/2$ | (i) |
| $v_{n+1}^{[i]} = \tilde{v}_{n+1} = v_n + \Delta t(1-\gamma)a_n$ | (ii) |
| $a_{n+1}^{[i]} = [d_{n+1}^{[i]}-d_{n+1}]/(\Delta t^2\beta) = 0.$ | (iii) |
| 3 | Evaluate residual forces using the equation |
| $\psi^{[i]} = f_{n+1} - Ma_{n+1}^{[i]} - p^I(d_{n+1}^{[i]}, v_{n+1}^{[i]}) - p^E(\tilde{d}_{n+1}, \tilde{v}_{n+1}).$ | (iv) |
| 4 | If required, form the effective stiffness matrix using the expression |
| $K^* = M/(\Delta t^2\beta) + \gamma C_T^I/(\Delta t\beta) + K_T^I(d_{n+1}^{[i]}).$ | (v) |
| Otherwise use a previously calculated $K^*$ . |
| (Note that $K_T^I = \partial p^I/\partial d$ and $C_T^I = \partial p^I/\partial v$ ). |
| 5 | Perform factorization, forward reduction and backsubstitution as required to solve |
| $K^* \Delta d^{[i]} = \psi^{[i]}$ . | (vi) |
| 6 | Enter corrector phase in which we set |
| $d_{n+1}^{[i+1]} = d_{n+1}^{[i]} + \Delta d^{[i]}$ | (vii) |
| $a_{n+1}^{[i+1]} = [d_{n+1}^{[i+1]} - \tilde{d}_{n+1}]/(\Delta t^2\beta)$ | (viii) |
| $v_{n+1}^{[i+1]} = v_{n+1} + \Delta t\gamma a_{n+1}^{[i+1]}$ . | (ix) |
| 7 | If $\Delta d^{[i]}$ and/or $\psi^{[i]}$ do not satisfy the convergence conditions, then set i = i+1 and go to step 3, otherwise continue. |
| 8 | Set | (x) |
| $d_{n+1} = d_{n+1}^{[i+1]}$ | (xi) |
| $v_{n+1} = v_{n+1}^{[i+1]}$ | (xii) |
| $a_{n+1} = a_{n+1}^{[i+1]}$ | |
| for use in the next time step. Also set n = n+1, form p and begin next time step. |
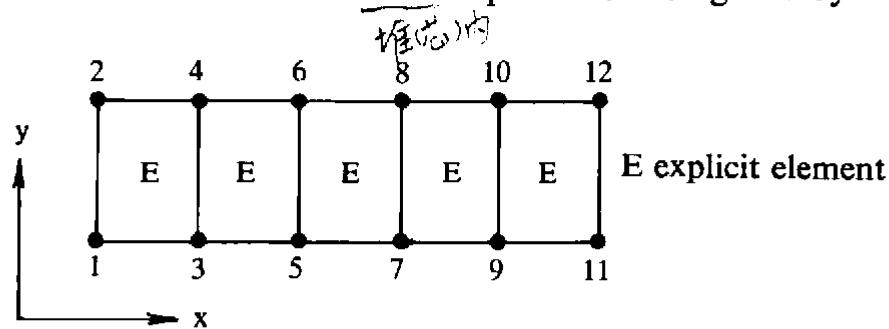
Consider the three meshes and effective stiffness matrices shown in Fig. 11.2(a)–(c):
(i) When there are only explicit elements, $K^*$ is diagonal. In other words $K^*$ has the same profile structure as $M^E$ (Fig. 11.2(a)).
(ii) For a mesh consisting of only implicit elements $K^*$ has the same profile structure as $K^I$ (Fig. 11.2(b)).
(iii) For the partitioned mesh containing both implicit and explicit groups we see the appropriate combination of parts of both profile structures (Fig. 11.2(c)).
To fully exploit the profile structure of $K^*$ , Hughes et al. (4) have suggested the use of profile solvers. In our implementation of the scheme we adopt a slightly modified version of the in-core profile solver given by Bathe and Wilson. (9)