nstep : 총 스텝수
i : 등차증분 step 수
현재스텝에서의 외력벡터는 다음과 같이 설정됩니다.
$$
\boldsymbol {P} _ {n} = \lambda_ {n} \cdot \boldsymbol {P} _ {0} \tag {47}
$$
# (3) 3단계: 최종 스텝의 증분하중 ( n nstep )
최종 하중증분스텝( nstep )의 외력벡터는 다음과 같습니다.
$$
\boldsymbol {P} _ {n s t e p} = \lambda_ {n s t e p} \cdot \boldsymbol {P} _ {0}; \lambda_ {n s t e p} = 1. 0 \tag {48}
$$
line
| INCREM. STEP | ITERATION | LOAD | PRAMTER |
| ------------ | --------- | ------ | ------- |
| 1 | 2 | 0.39738| |
| 2 | 3 | 0.45764| |
| 3 | 3 | 0.51473| |
| 4 | 3 | 0.56865| |
| 5 | 3 | 0.61940| |
| 6 | 2 | 0.66697| |
| 7 | 3 | 0.71138| |
| 8 | 2 | 0.75261| |
| 9 | 2 | 0.79067| |
| 10 | 2 | 0.82556| |
| 11 | 3 | 0.85727| |
| 12 | 2 | 0.88582| |
| 13 | 2 | 0.91119| |
| 14 | 3 | 0.93339| |
| 15 | 2 | 0.95242| |
| 16 | 2 | 0.96828| |
| 17 | 2 | 0.98097| |
| 18 | 2 | 0.99048| |
| 19 | 2 | 0.99683| |
| 20 | 2 | 1.00000| |
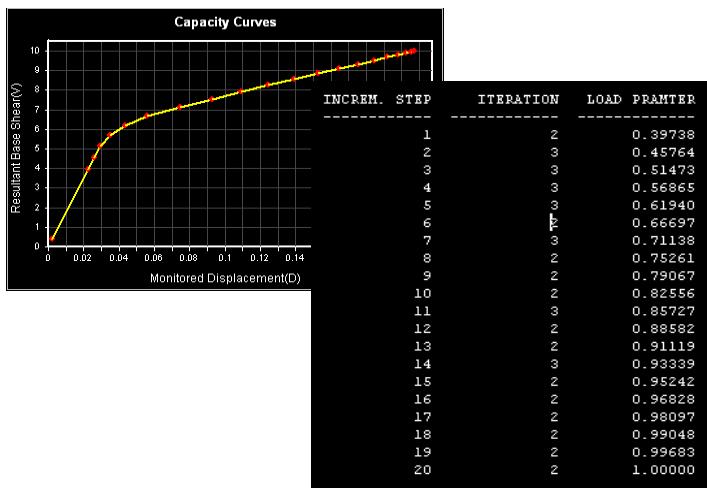
그림 2.8.46 자동증분제어에 의한 하중증분해석시의 해석예 (하중 파라메터)
# Equal Step Control
설정된 하중을 총 증분수로 나누어 증분해석을 합니다. 따라서, 각 증분에서의 하중 파라메터의 증분량은 동일하며, 각 증분하중도 동일한 값이 적용됩니다.
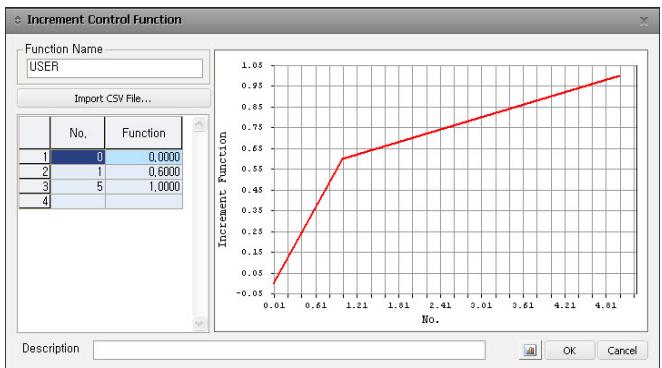
# Incremental Control Function
사용자가 정의한 함수룰 근거로 각 증분의 하중 파라메터를 구하여, 해석합니다.설정방법과 해석시에 고려방법은 다음과 같습니다.
1. Pushover load case에서 총 스텝수 nstep 를 설정합니다.
2. Stepping Control Option>Incremental Control Function을 선택하여 증분함수를 입력합니다.
line
| No. | Increment Function |
| ---- | ------------------ |
| 0.01 | -0.05 |
| 0.61 | 0.55 |
| 1.21 | 0.65 |
| 1.61 | 0.75 |
| 2.41 | 0.85 |
| 3.01 | 0.90 |
| 3.61 | 0.95 |
| 4.21 | 0.98 |
| 4.61 | 1.00 |
No. : 입력되는 하중 파라메터 함수의 X축 정의. 총 증분수와는 무관한 값으로 총 증분수를 변경하여도 함수를 변경할 필요는 없습니다.
Function : 해석에 직접 사용되는 하중 파라메터
3. 적용예
Case 1 : 각 증분의 하중 파라메터를 증분제어함수에 직접입력
nstep =10으로 설정
Incremental Control Function을 다음과 같이 설정
| No. | Function |
| 1 | 0.30 |
| 2 | 0.60 |
| 3 | 0.65 |
| 4 | 0.70 |
| 5 | 0.75 |
| 6 | 0.80 |
| 7 | 0.85 |
| 8 | 0.90 |
| 9 | 0.95 |
| 10 | 1.00 |
위와 같이 증분함수를 입력하면, 설정된 Function을 하중 파라메터로 그대로 적용합니다. 단, 총 증분수를 10으로 설정한 경우입니다.
Case 2 : 하중 파라메터를 총 증분수와 무관한 중분함수로 입력
nstep =10으로 설정
Incremental Control Function을 다음과 같이 설정
| No. | Function | | No. | Function |
| 0 | 0.0 | 또는 | 0.0 | 0.30 |
| 1 | 0.6 | | 0.2 | 0.60 |
| 5 | 1.0 | | 1.0 | 0.65 |
위와 같이 증분함수를 입력한 경우에 No.항의 최종값으로 No.항을 나누면두 함수의 No.값은 같게 되므로, 위의 두 함수는 동일한 조건이 됩니다.위와 같이 증분함수를 설정한 경우, 해석시의 각 증분에서의 하중 파라메터는 다음과 같이 반영됩니다. 단, 총 증분수는 10으로 설정
| Step No. | Load Parameter |
| 1 | 0.30 |
| 2 | 0.60 |
| 3 | 0.65 |
| 4 | 0.70 |
| 5 | 0.75 |
| 6 | 0.80 |
| 7 | 0.85 |
| 8 | 0.90 |
| 9 | 0.95 |
| 10 | 1.00 |
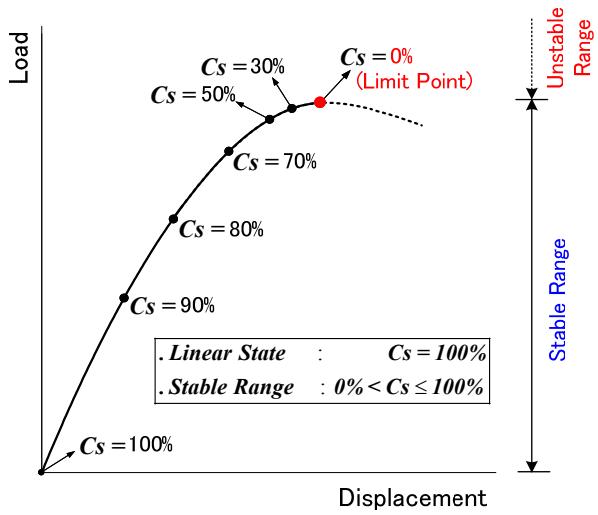
# Current Stiffness Ratio에 의한 하중증분해석의 자동종료
하중증분해석에 의한 정적증분해석에서는 구조물에 최대내력(구조물이 외력에 저항 할 수 있는 최대내력 : 그림 2.8.40의 점 C)이상의 외력이 작용하면, 하중증분해석으로 더 이상 안정해를 얻을 수 없는 해석불능 상태가 되어 발산하게 됩니다.midas Civil의 정적증분해석에서는 이와 같은 극한점에서 해석을 자동으로 종료하는 기능을 제공합니다.
Current Stiffness Ratio는 초기상태(탄성상태)에서의 구조물의 강성행렬과 현재상태의 강성행렬을 비율로 나타내어, 구조물의 상태를 판단하는 계수입니다.
Current Stiffness Ratio는 구조물의 상태에 따라서, 다음과 같이 표현됩니다.
탄성상태 Cs 100.0%
최대내력점까지의 상태 : $0 . 0 \% < C s < 1 0 0 . 0 \%$
최대내력점 상태 Cs 0.0%
최대내력점이후의 상태 : Cs 0.0%
현재의 증분에서 Cs가 0보다 작게 되면 안정해를 구할 수 없기 때문에 직전 하중스텝으로 돌아가서 해석을 자동종료 합니다.
line
| Displacement | Load | Cs (%) |
| ------------ | ---- | ------ |
| 0 | 100 | 100 |
| 30 | 50 | 30 |
| 50 | 70 | 50 |
| 70 | 80 | 70 |
| 90 | 90 | 80 |
| 100 | 100 | 100 |
그림 2.8.47 Current Stiffness Ratio
# 8-7-5 목표변위에 의한 변위제어 방법
midas Civil에서 변위제어는 사용자가 구조물에서 발생할 수 있는 목표변위를 미리 설정하고 구조물에서 목표변위가 달성될 때까지 하중을 증가시키는 방법입니다.
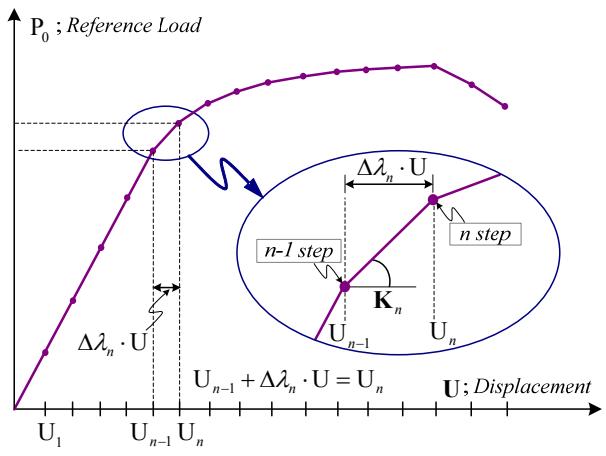
midas에서 변위제어는 사용자가 구조물에서 발생할 수 있는 목표변위를 미리 설정하고 구조물에서 목표변위를 적절히 분할하여 단계적으로 변위를 증가시켜 해석하는 방법입니다. 각 증분에서의 변위증분량은 목표변위 U 에 증분 파라메터 Δλ 를 곱하여 산정합니다. 변위제어는 최대보유내력이후의 거동을 파악할 수 있습니다.
$$
U _ {n} = U _ {n - 1} + \Delta \lambda_ {n} \cdot U \tag {49a}
$$
$$
\Delta \lambda_ {n} \cdot U = U _ {n} - U _ {n - 1} \tag {49b}
$$
여기서, $U_{n}$ : n 스템까지 누적된 변위벡터
$U_{n}$ : n-1 스텝까지 누적된 변위벡터
$\Delta\lambda_{n}$ : n 스텝에서의 증분 파라메터
line
| U | P₀ (Reference Load) |
|-------|----------------------|
| U₁ | Δλₙ·U |
| Uₙ₋₁ | Δλₙ·U (n-step) |
| Uₙ₋₁ | Δλₙ·U (n-step) |
| Uₙ | Δλₙ·U (n-step) |
| Uₙ₋₁ | Δλₙ·U = Uₙ |
| Uₙ | Δλₙ·U (n-step) |
| Uₙ₋₁ | Δλₙ·U (n-step) |
| Uₙ | Δλₙ·U (n-step) |
| Uₙ₋₁ | Δλₙ·U = Uₙ |
| Uₙ | Δλₙ·U (n-step) |
| Uₙ₋₁ | Δλ₁·U |
| Uₙ | Δλ₁·U (n-step) |
| Uₙ₋₁ | Δλ₁·U (n-step) |
| Uₙ | Δλ₁·U (n-step) |
| Uₙ₋₁ | Δλ₁·U = Uₙ |
| Uₙ | Δλ₁·U (n-step) |
| Uₙ₋₁ | Δλ₁·U = Uₙ |
| Uₙ | Δλ₁·U (n-step) |
| Uₙ₋₁ | Δλ₁·U = Uₙ |
| Uₙ | Δλ₁·U (n-step) |
| Uₙ₋₁ | Δρ₁·U |
| Uₙ | Δρ₁·U |
| Uₙ₋₁ | Δρ₁·U |
| Uₙ | Δρ₁·U |
| Uₙ₋₁ | Δρ₁·U |
| Uₙ | Δρ₁·U |
| Uₙ₋₁ | Δρ₁·U |
| Uₙ | Δρ₁·U |
| Uₙ₋₁ | Δρ₁·U |
그림 2.8.48 변위증분법
목표변위는 크게 Global Control과 Master Node Control로 설정할 수 있습니다.Global Control은 구조물에서 발생하는 최대변위가 사용자가 입력한 목표변위를 만족할 때까지 하중을 증가시키는 방법입니다. 이것은 하중의 방향성과 무관합니다.Master Node Control은 사용자가 특정한 절점을 지정하고 그 절점에서 사용자가지정한 방향에 대한 목표변위를 만족하도록 하중을 증가시키는 방법입니다. 성능에 기초한 내진설계에서는 대부분 최대변위가 발생할 가능성이 있는 절점과 방향을 고려하여 목표변위를 설정합니다.
목표변위는 구조물 전체높이의 1%, 2%, 4% 정도로 가정합니다. 이 값들은 구조물의 시스템 수준에서의 최대 층간변위에 해당하는 것으로 구조물의 손상상태와 연관성이 있습니다. 즉, ATC-40이나 FEMA-273 등에서는 최대 층간변위 1%를Immediate Occupant Level, 2%를 Life Safety Level, 4%를 Collapse Prevention Level로 정의합니다. 이 값들은 부재수준에서는 다르게 적용될 수 있습니다.
# 8-7-6 작용하중
작용하중은 각 층에서의 관성력을 반영할 수 있는 횡력이 되어야 합니다. 따라서최소한 2가지 이상의 횡력 분포를 작용시키도록 권장하고 있습니다. midas Civil에서는 3가지 형태의 횡하중 분포(Lateral Load Pattern)를 제공합니다. 정적하중의 형상에 따른 하중(Static Load Case), 모드형상에 따른 하중분포(Mode Shape), 각 층의 질량에 비례하는 하중분포(Uniform Acceleration)가 있습니다. 정적하중의 형상에따른 하중분포를 이용하면 사용자가 임의 형상으로 하중을 분포시킬 수 있습니다.그리고 모드형상에 따른 분포하중을 사용하기 위해서는 반드시 고유치해석이 선행되어야 합니다.
정적증분해석에서 작용하중은 각 층에서의 관성력을 반영할 수 있는 횡력이 되어야 합니다. 따라서, 작용하중은 기본적으로 일정한 분포를 가진 횡하중 또는 수평하중을 설정하는 것이 일반적입니다. 정적증분해석시에는 최소한 2가지 이상의 횡력 분포를 작용시키도록 권장하고 있으며, midas Civil에서는 다음의 4가지 형태의횡하중 분포(Lateral Load Pattern)를 제공합니다.
정적하중의 형상에 따른 하중분포(Static Load Case)
질량에 비례하는 하중분포(Uniform Acceleration)
모드형상에 따른 하중분포(Mode Shape)
일반화 모드형상과 질량의 곱에 의한 하중분포(Normalized Mode Shape\*Mass)
각 하중분포에 의해 실제 해석에 작용하는 하중은 다음과 같이 산정됩니다.
# 정적하중의 형상에 따른 하중분포(Static Load Case)
정적하중의 분포는 선형탄성에서 정의된 정적하중을 적용합니다. 하중조건 중에서사용자가 설정한 지진하중 이외에도 사용자가 하중조건에서 설정한 임의의 하중분포도 설정가능 합니다. 또한 특정 절점에서의 절점하중을 포함하여 하중조건에서설정한 하중을 정적증분해석시의 하중으로 사용할 수 있습니다
# 질량에 비례하는 하중분포(Uniform Acceleration)
힘과 질량의 관계는 다음과 같이 나타낼 수 있습니다.
$$
m \cdot a = P \tag {50}
$$
여기서 m : 질량 $\left( { \frac { N } { m / \sec ^ { 2 } } } \right)$ 2 / secm
a : 가속도 2 m / sec
P : 힘 N
질량을 정적인 하중분포로 사용하기 위해서 가속도를 다음과 같이 가정합니다.
$$
a \approx 1. 0 m / \sec^ {2} \tag {51}
$$
식(15)을 식(14)에 대입하면, 질량을 하중으로 표현할 수 있습니다. 즉, 질량에 비례하는 하중분포는 각 자유도의 질량이 그대로 하중으로 적용됩니다.
$$
m _ {i} \cdot 1. 0 = P _ {i} \tag {52}
$$
여기서 mi : i번 자유도의 질량
Pi : i번 자유도의 외력
# 모드형상에 따른 하중분포(Mode Shape)
고유모드는 구조물이 자유진동(또는 변형) 할 수 있는 고유형상을 의미하며, 구조물의 동적 특성을 나타내는 중요한 지표중의 하나입니다. 특히, 구조물의 1차 모드는구조물이 진동할 때 가장 적은 에너지(또는 힘)로 변형되는 형상을 의미하기 때문에, Pushover해석에서 모드형상을 하중분포로 설정하는 경우에는 가력방향의 1차모드형상을 설정하는 것이 일반적입니다.
정적증분해석에서 모드형상을 하중분포로 설정하는 경우, 가력방향의 모드형상을하중분포로 설정할 수 있으며, 각 모드의 조합도 가능합니다.
모드형상을 하중분포로 설정할 경우, 실제 해석에 작용하는 하중은 다음과 같이 산정됩니다.
모드형상은 물리적으로 구조물의 변형, 즉 각 절점의 변위를 의미하므로 변위분포를 하중분포로 변환할 필요가 있습니다. 식(16)에 나타낸 것과 같이 질량은 하중으로 표현할 수 있으므로, 식(16)의 관계를 응용하여 모드형상을 하중으로 표현합니다.
$$
\varphi_ {i} \frac {\sum_ {j = 1} ^ {n} m _ {j}}{\sum_ {j = 1} ^ {n} \varphi_ {j}} = P _ {i} \tag {53}
$$
여기서 i : i번 자유도의 모드형상(변위)
Pi : i번 자유도의 외력
$\sum _ { j = 1 } ^ { n } m _ { j }$ : 모든 자유도에 대한 질량의 총합
$\sum _ { j = 1 } ^ { n } \varphi _ { j }$ : 모든 자유도에 대한 모드형상(변위)의 총합
# 일반화 모드형상과 질량의 곱에 의한 하중분포(Normalized Mode shape \* Mass)
정적증분해석의 하중재하시에 아래식과 같이 변위를 가정하고, 질량을 곱하여 하중을 결정하는 방법입니다.
$$
P _ {i} = m _ {i} \Phi_ {i} \tag {54}
$$
여기서 $\Phi_{i}$ : 최대치로 일반회된 i번 자유도의 모드형상(변위)
$P_{i}$ : i번 자유도의 외력
$m_{i}$ : i번 자유도의 질량 (혹은, 총 질량)
일반화된 모드형상 $\Phi$ 는 고유치해석을 통해 얻어진 고유모드 $\varphi$ 를 최대값으로 일반화 하여 다음과 같이 구합니다.
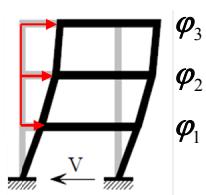
text_image
φ₃
φ₂
φ₁
V
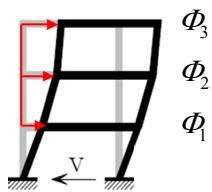
text_image
Φ₃
Φ₂
Φ₁
V
$$
\varphi_ {M A X} = \max \left(\varphi_ {1}, \varphi_ {2}, \varphi_ {3} \dots \dots , \varphi_ {i}\right)
$$
$$
\Phi_ {i} = \frac {\varphi_ {i}}{\varphi_ {M A X}} \tag {55}
$$
여기서 $\varphi_{i}$ : i번 자유도의 모드형상(변위)
따라서, Φ의 최대값은 10이 됩니다.
# 8-7-7 정적증분해석의 비선형 요소
midas Civil의 정적증분해석에서 제공하는 비선형요소는 2D 보요소(2-DimensionalBeam Element), 3D 보-기둥요소(3-Dimensional Beam-Column Element), 트러스요소(Truss Element) 그리고 비선형 범용연결요소 등이 있습니다. 각 요소는 다음과 같은 특징을 가지고 있습니다.
# 정적증분해석의 비선형 요소의 개요
# (1) 모멘트-회전각 관계 비선형 보요소
요소강성 : 유연도법에 의한 정식화
모멘트성분 힌지 특성 : 모멘트-회전각 관계로 정의
비선형 힌지 : 일축(Single Component) 및 다축-힌지(P-M-M)모델
비선형 힌지의 위치
RC, Steel Type : 요소양단(축, 전단, 비틀림, 모멘트)
골격곡선 : Bilinear, Trilinear, FEMA 타입
비선형 힌지의 초기강성 : 요소의 초기강성행렬(탄성상태)구성시에는 직접 반
영되지 않음. 비탄성 스프링 항복 후에만 해석에 영향을 미침
모멘트성분 힌지의 초기강성 : 6EI/L, 3EI/L, 2EI/L로 가정
# (2) 모멘트-곡률 관계 비선형 보요소
요소강성 : 유연도법에 의해 정식화(수치적분)
모멘트성분 힌지 특성 : 모멘트-곡률관계로 정의
비선형 힌지 : 일축(Single Component) 및 다축-힌지(P-M-M)모델
골격곡선 : Bilinear, Trilinear 타입
Lumped Type 요소
요소양단의 소성화만 고려
비선형 힌지의 초기강성 : 요소의 초기강성행렬(탄성상태)구성시에는
직접 반영되지 않음. 비탄성 스프링 항복 후에만 해석에 영향을 미침
비선형 힌지의 위치 : 요소양단(축, 전단, 비틀림, 모멘트)
Distributed Type 요소