# 9-4-16 Ramberg-Osgood Type
# 이력의 개요
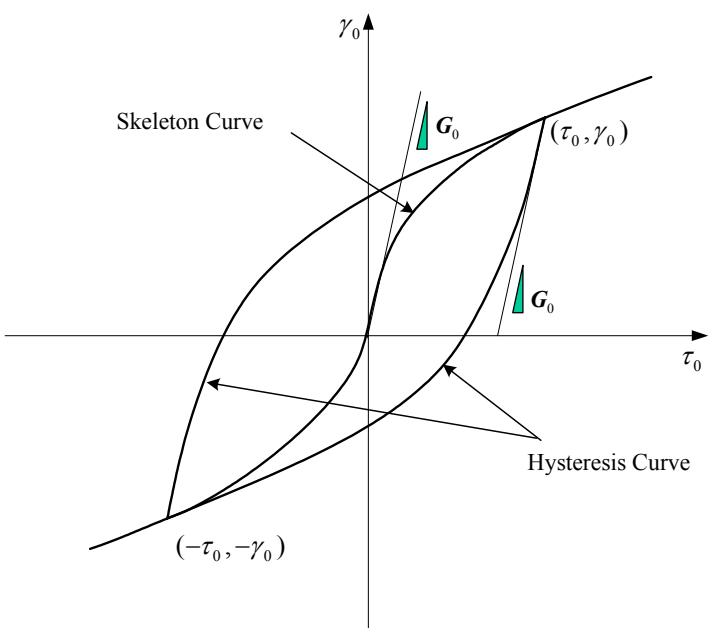
Ramberg-Osgood 이력모델은 금속재료의 비선형해석을 위해서 제안된 것으로, 이력곡선은 Masing의 법칙을 따르고 있습니다. 지반 비선형 Ramberg-Osgood 모델의 골격곡선과 이력곡선은 다음과 같이 표현됩니다.
$$
\text { 골격곡선 }: \gamma = \frac {\tau}{\mathbf {G} _ {0}} \left(1 + \alpha | \tau | ^ {\beta}\right)
$$
$$
\text { 이력곡선 }: \frac {\gamma \pm \gamma_ {0}}{2} = \frac {\tau \pm \tau_ {0}}{2 \boldsymbol {G} _ {0}} \left(1 + \alpha \left| \frac {\tau \pm \tau_ {0}}{2} \right| ^ {\beta}\right)
$$
$$
\beta = \frac {2 \pi \boldsymbol {h} _ {\max}}{2 - \pi \boldsymbol {h} _ {\max}}, \alpha = \left(\frac {2}{\gamma_ {r} \boldsymbol {G} _ {0}}\right) ^ {\beta}
$$
여기서, $\gamma$ : 전단변형율,
τ: 전단응력,
$G_{0}$ : 전단탄성계수
$\gamma_{r}$ : 기준 전단변형율
α,β : Ramberg-Osgood 모델의 파라메터
# 골격곡선의 정의
이력모델의 비선형특성은 이하의 값으로 정의됩니다.
| $\mathbf{G}_{0}$ , | :초기강성(전단탄성계수) |
| $\gamma_{r}$ | :기준 변형율 |
| $\mathbf{h}_{\max}$ | :최대감쇠정수 |
text_image
Skeleton Curve
G₀
(τ₀,γ₀)
Hysteresis Curve
(-τ₀,-γ₀)
그림 2.9.27 Ramberg-Osgood 이력모델
# 9-4-17 Hardin-Drnevich Type
# 이력의 개요
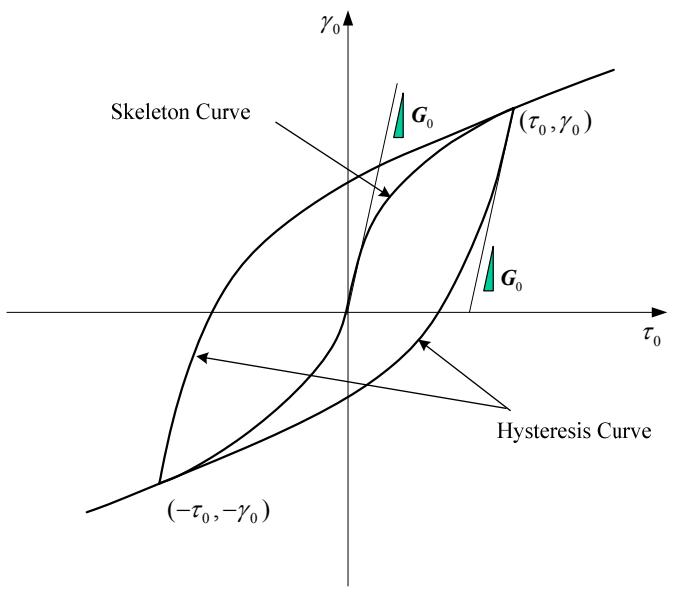
Hardin-Drnevich 모델의 이력곡선은 훑의 정적인 응력-변형율관계에 주로 사용되는 쌍곡선 모델을 그대로 골격곡선에 사용합니다.
$$
\text { 골격곡선 }: \tau = \frac {\mathbf {G} _ {0} \cdot \gamma}{1 + \left| \gamma / \gamma_ {r} \right|}
$$
$$
\text { 이력곡선 }: \tau - \tau_ {m} = \frac {\mathbf {G} _ {0} (\gamma - \gamma_ {m})}{1 + \left| \gamma - \gamma_ {m} \right| / 2 \gamma_ {r}} (\text { 하강곡선 })
$$
$$
\tau + \tau_ {m} = \frac {\mathbf {G} _ {0} (\gamma + \gamma_ {m})}{1 + \left| \gamma + \gamma_ {m} \right| / 2 \gamma_ {r}} (\text {상승곡선})
$$
여기서, $\gamma$ : 전단변형율,
τ: 전단응력,
$G_{0}$ : 전단탄성계수
$\gamma_{r}$ : 기준 전단변형율
$(\gamma_{m},\tau_{m})$ : 이력곡선상의 반전점
# 골격곡선의 정의
이력모델의 비선형특성은 이하의 값으로 정의됩니다.
$G _ { 0 }$ : 초기강성(전단탄성계수)
$\gamma _ { r }$
text_image
Skeleton Curve
γ₀
G₀
(τ₀,γ₀)
τ₀
Hysteresis Curve
(-τ₀,-γ₀)
그림 2.9.28 Hardin-Drnevich 이력모델
# 9-5 다축-힌지 이력모델(Hysteresis Model for Multi-axial Hinge)
지진과 같은 복잡한 형태의 하중에 대해서 축력과 2축 힌을 받는 기둥은 3개 성분 사이에 복잡한 상호작용이 존재합니다. 이와 같은 상호작용을 보다 상세하게 모델링하기 위해서는 하나의 기둥을 입체요소로 세분하여 해석할 수 있으나, 상당한 계산량이 요구되기 때문에 요소의 갯수를 줄이기 위해 다축-힌지 모델(Hysteresis Model for Multi-axial Hinge)이 일반적으로 사용되고 있습니다. 다축-힌지 모델은 요소내에 복수의 비선형 힌지를 할당하여 힌지의 상태에 의해 부재의 비탄성거동을 해석하는 모델로서, 파이버 모델(Fiber Model)과 다축-힌지 이력모델로 구분할 수 있습니다.
# ▪ 파이버 모델(Fiber Model)
파이버 모델은 부재내에 비탄성 거동을 모니터링 하는 단면을 섬유로 세분하여, 단일 보요소로 모델링하는 모델입니다. 따라서, 복수개의 요소로 분할하지 않고도, 정밀한 비선형 거동을 파악할 수 있는 장점이 있습니다. 그러나, 대규모 구조물의 비선형 시간이력해석시에 모든 구조부재를 파이버 모델로 모델링할 경우, 계산시간이 과도하게 소요되며 및 메모리 문제가 발생할 수 있습니다.
# ▪ 다축-힌지 이력모델
다축-힌지 이력모델은 축력과 2축 휈성분을 항복곡면에 의해 정의하고, 소성이론(Plasticity Theory)에 의해, 축력과 2축 휈성분들 사이의 상호작용을 고려하는 모델입니다. 축력과 휈성분은 연성하지만 각각의 성분은 이력모델로서 정의되므로, 단면을 세분하는 파이버 모델에 비해 힌지의 상태판정에 소요되는 계산량이 대폭 감소되어 대규모 구조물의 비선형 시간이력해석에도 적용가능합니다.
midas Civil에서는 다축-힌지 모델로서 파이버 모델과 소성이론을 응용한 이동경화형 이력모델을 제공합니다.
# 9-5-1 이동경화형 (Kinematic Hardening Type)
다축-힌지를 대상으로 하는 이동경화형 이력모델은 2개의 항복면을 사용한 이동경화 법칙을 따릅니다. 이는 기본적으로 일축-힌지를 대상으로 하는 3선형 이동경화형 Trilinear이력을 축성분과 2축 휨성분으로 확장시킨 것입니다. 힌지의 상태 판정및 그에 따른 유연도 행렬 계산은 정해진 항복면에 대한 하중점의 상대적 위치관계에 의해 결정됩니다. 제하강성은 탄성강성과 동일하며, 2개의 항복면은 항복에의해 위치만 이동하고 형태나 크기 변화는 없다고 가정합니다.
항복의 판정은 그림 2.9.29에 나타낸 것과 같이 하중점이 1차 항복면 내부에 위치한 경우에는 탄성상태로 간주합니다. 재하 과정에서 하중점이 1차 항복면과 만나면 1차 항복이 발생한 것으로 간주하며 계속해서 하중점이 2차 항복면에 도달하면2차 항복이 발생한 것으로 간주합니다.
(a) Elastic Loading
(b) Post Crack
(c) Post Yielding
(d) UnLoading
그림 2.9.29 항복면의 이동 및 강성변화
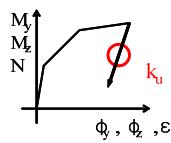
힌지의 유연도 행렬은 세 개의 직렬 연결된 스프링의 유연도의 합으로 가정됩니다.직렬 연결된 스프링은 각각 탄성 스프링과 두개의 비탄성 스프링으로 구성되며 초기에는 탄성 스프링만 유연도를 갖고 나머지는 강체(Rigid)로 가정합니다. 하중점이 각각의 항복면과 접할때 마다 관련된 비탄성 스프링의 유연도가 발생하는 것으로 간주합니다. N-차 항복 후에 유연도 행렬의 계산식은 다음과 같습니다. 여기서항복면과 관련된 항목은 현재의 하중점이 접하고 있는 항복면에 대해서만 계산됩니다.
$$
F _ {s} = K _ {s, (0)} ^ {- 1} + \sum_ {i = 1} ^ {N} \frac {a _ {(i)} a _ {(i)} ^ {T}}{a _ {(i)} ^ {T} K _ {s , (i)} a _ {(i)}}
$$
여기서,
$$
K _ {s, (i)} = \left[ \begin{array}{c c c} k _ {1, (i)} & 0 & 0 \\ 0 & k _ {2, (i)} & 0 \\ 0 & 0 & k _ {3, (i)} \end{array} \right]
$$
$$
\frac {1}{k _ {n , (i)}} = \left(\frac {1}{r _ {n , (i)}} - \frac {1}{r _ {n , (i - 1)}}\right) \frac {1}{k _ {n , (0)}} \quad (n = 1, 2, 3; i = 1, 2)
$$
i : 현재의 하중점이 접하고 있는 항복면의 차수
Fs : 힌지의 접선 유연도 행렬
a(i) : i-번째 항복면의 하중점 위치에서의 법선 벡터
kn,(i) : n-번째 성분의 i-번째 직렬 스프링 강성(i=0인 경우에는 탄성강성)
rn,(i) : n-번째 성분의 i-번째 항복 시 강성 저감률(i=0인 경우에는 1.0)
rn,(i) : n-번째 성분의 i-번째 항복 시 강성 저감률(i=0인 경우에는 1.0)
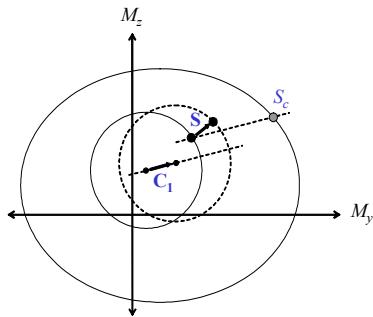
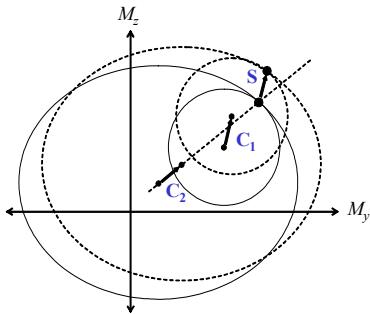
상기 식의 유연도 행렬 Fs는 탄성상태에서는 대각행렬로서 3개 성분이 완전히 독립적이며 항복 변형 중에는 대각성분에 의해 3개 성분 사이의 상관작용이 발생합니다. 하중점이 도달 항복면의 외측으로 이동하게 되면 항복면은 하중점과 접해있는 상태를 유지하도록 함께 이동합니다. 이동 방향은 변형된 Mroz의 경화법칙(Hardening Rule)을 따릅니다. 하중점이 항복면상에서 내측으로 이동하게 되면 제하로 판정하며 제하강성은 탄성강성과 동일하다. 제하과정에서 항복면은 이동하지않습니다.
Sc : conjugate loading point
S : translation of loading point
: translation of the 1st yield surface center
: translation of the 2nd yield surface center
text_image
Mz
S
C1
Sc
My
(a) 1차 항복 이후의 경화 상태
text_image
Mz
S
C1
C2
My
(b) 2차 항복 이후의 경화 상태
그림 2.9.30 경화법칙
# 9-5-2 P-M 및 P-M-M 상관작용
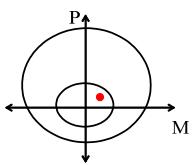
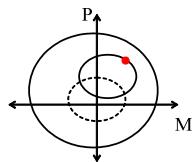
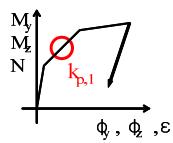
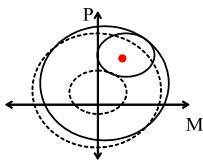
기둥이나 교각과 같이 축력과 휨 모멘트가 동시에 작용하는 부재의 경우, 축력과모멘트의 상관작용에 의해 각 성분이 독립적으로 작용할 때와는 다른 항복강도를갖게 됩니다. 특히 3차원 시간이력해석에서는 2방향 지진에 의해 기둥 부재 내부의 2축 휨 모멘트 및 축력 사이에 복잡한 상관작용이 발생하고 이는 구조물의 동적응답에 큰 영향을 미칠 수 있습니다. midas Civil의 비선형 시간이력 해석에서는P-M 상관작용 또는 P-M-M 상관작용을 고려한 해석을 수행할 수 있습니다.
# P-M 상관작용
P-M 상관작용은 축력의 영향을 고려하여 힌지의 휨 항복강도를 산정함으로써 반영됩니다. 이 때 2축 휨 모멘트의 상관작용은 무시됩니다. 각각의 시간증분에 대한힌지 상태판정에 있어서는 축력과 두개의 휨 모멘트는 모두 상호 독립적인 것으로간주됩니다. 축력을 고려한 휨 모멘트 항복강도의 재산정을 위해서는, 비선형 정적해석을 수행하여 정적해석에 의한 축력을 계산하고, 연속해서 시간이력 해석을 수행하도록 각각의 하중을 별도의 하중조건으로 만든 뒤 재하순서 및 하중의 연속성을 부과하여 해석을 수행하여 합니다.
대상 요소는 P-M 상관작용이 적용되는 힌지 속성이 부여된 비탄성 보요소입니다.이 때 초기단면력은 시간변동 정적하중(Time Varying Static Load)에 포함되는 모든 정적하중에 대한 선형탄성 해석결과의 조합으로 가정되며 조합에 사용되는 계수는 시간변동 정적하중에 입력하는 Scale Factor에 의해 정의됩니다.
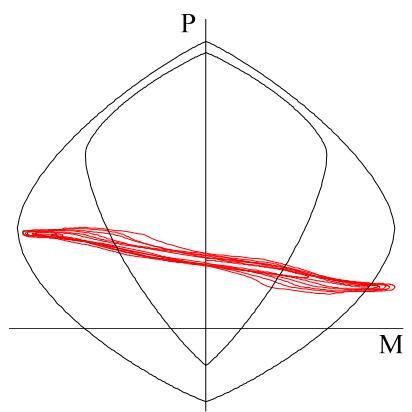
MC : 1st Yield Moment MY : 2nd Yield Moment S : Loading Point by Static Loads
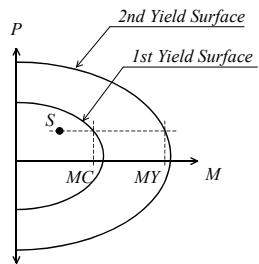
text_image
2nd Yield Surface
1st Yield Surface
P
S
MC MY M
(a)
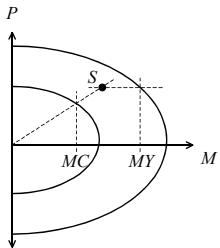
text_image
P
S
MC MY M
(b)
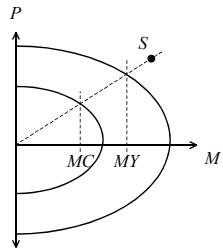
text_image
P
S
MC MY M
그림 2.9.31 P-M 상관작용에 의한 휨 항복강도 산정
휨에 대한 항복강도의 계산은 위와 같이 계산된 단면력의 2차원 상관곡선의 상대적 위치에 의해 결정되며 이는 그림 2.9.31에 나타냅니다. 초기 단면력이 상관곡선내측에 있으면, 이 하중점의 축력에 해당되는 휨 항복강도를 상관곡선으로부터 계산합니다. 하중점이 상관곡선 외측에 있으면, 하중점과 원점을 잇는 직선이 항복면과 교차하는 점에서 휨 항복강도를 계산합니다.
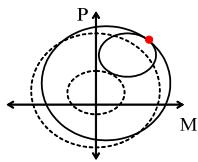
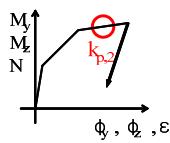
# P-M-M 상관작용
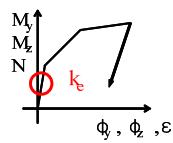
P-M-M 상관작용은 다축-힌지 이력모델을 사용함으로써 비선형 시간이력해석에 반영될 수 있습니다. 다축-힌지 이력모델은 축력 및 2축 휨 모멘트의 상호작용을 소성이론을 응용해서 구현한 것으로서, P-M-M 상관을 고려하면, 변동축력에 의한 휨항복강도를 변화시키면서 각 시간증분마다 3개 성분의 변동을 통합적으로 고려한상태판정을 수행합니다. midas Civil에서는 이동경화형(Kinematic Hardening type)이지원됩니다.
text_image
P
M
(a) P-M Type(초기축력)
text_image
P
M
(b) P-M-M Type(변동축력)
그림 2.9.32 P-M과 P-M-M 상관에서의 축력관계
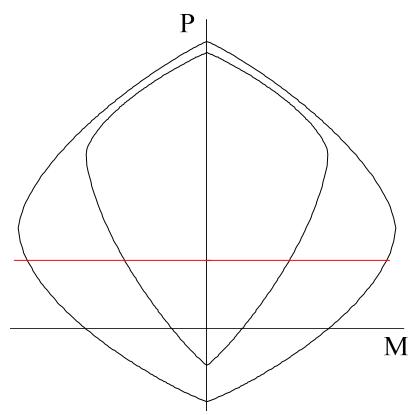
# 9-5-3 항복면의 근사화
힌지의 항복강도 산정 또는 상태판정에 있어서 P-M 또는 P-M-M 상관작용을 고려하기 위해서는 P-M 상관곡선으로부터 3차원 상의 항복면을 정의할 필요가 있습니다. 그러나 제한된 P-M 상관곡선의 데이터로부터 정확한 3차원 상의 항복면을 정의하는 것은 어렵기 때문에 이를 단순한 수식으로 근사화할 수 있습니다. midasCivil에서 P-M 상관곡선은 다음 식을 통해 근사화 됩니다.
$$
\left| \frac {M}{M _ {\max}} \right| ^ {\gamma} + \left| \frac {P - P _ {\mathrm{bal}}}{P _ {\max} - P _ {\mathrm{bal}}} \right| ^ {\beta} = 1. 0
$$
여기서 M : 하중점의 요소좌표계 y축 또는 z축에 대한 모멘트 성분(My 또는 Mz)
$M _ { \mathrm { { m a x } } } .$ 요소좌표계 y축 또는 z축에 대한 최대 휨 항복강도 $( M _ { y , \operatorname* { m a x } }$ 또는 $M _ { z , \mathrm { m a x } } )$
$P$ : 하중점의 축력 성분
$P _ { \mathsf { b a l } }$ : y-축 또는 z-축에 대한 균형파괴시 축하중 $( P _ { \mathsf { b a l } , y } , P _ { \mathsf { b a l } , z } )$
$P _ { \mathrm { m a x } }$ : 축 항복강도로서 정(+), 부(-) 비대칭 가능.
$\boldsymbol { \mathsf { Y } }$ : 곡면 차수
$\beta$ : 요소좌표계 y축/z축에 대한 곡면 차수로서 정(+), 부(-) 비대칭 가능
midas Civil에서 M-M 상관곡선은 다음 식을 통해 근사화 됩니다.
$$
\left| \frac {M _ {y}}{M _ {y , \max}} \right| ^ {\alpha} + \left| \frac {M _ {z}}{M _ {z , \max}} \right| ^ {\alpha} = 1. 0
$$
여기서 $M _ { y , \mathrm { m a x } }$ : 요소좌표계 y-축에 대한 최대 휨 항복강도
$M _ { z , \mathrm { m a x } }$ : 요소좌표계 z-축에 대한 최대 휨 항복강도
α : 곡선 차수
3차원 항복면은 상기의 근사화된 상관곡선을 만족할 수 있는 다음 수식을 사용합니다.